 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDB SwinT: A Dual-Branch Swin Transformer Network for Road Extraction in Optical Remote Sensing Imagery
Mar 25, 2026With the continuous improvement in the spatial resolution of optical remote sensing imagery, accurate road extraction has become increasingly important for applications such as urban planning, traffic monitoring, and disaster management. However, road extraction in complex urban and rural environments remains challenging, as roads are often occluded by trees, buildings, and other objects, leading to fragmented structures and reduced extraction accuracy. To address this problem, this paper proposes a Dual-Branch Swin Transformer network (DB SwinT) for road extraction. The proposed framework combines the long-range dependency modeling capability of the Swin Transformer with the multi-scale feature fusion strategy of U-Net, and employs a dual-branch encoder to learn complementary local and global representations. Specifically, the local branch focuses on recovering fine structural details in occluded areas, while the global branch captures broader semantic context to preserve the overall continuity of road networks. In addition, an Attentional Feature Fusion (AFF) module is introduced to adaptively fuse features from the two branches, further enhancing the representation of occluded road segments. Experimental results on the Massachusetts and DeepGlobe datasets show that DB SwinT achieves Intersection over Union (IoU) scores of 79.35\% and 74.84\%, respectively, demonstrating its effectiveness for road extraction from optical remote sensing imagery.
Motorway Traffic Flow Prediction using Advanced Deep Learning
Jul 17, 2019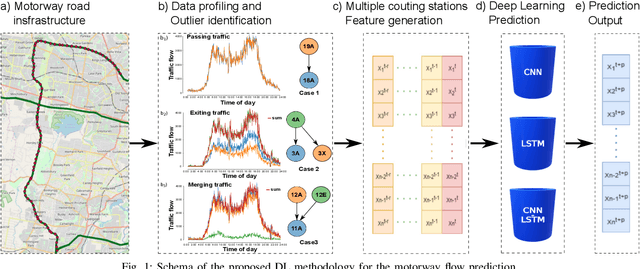
Congestion prediction represents a major priority for traffic management centres around the world to ensure timely incident response handling. The increasing amounts of generated traffic data have been used to train machine learning predictors for traffic, however this is a challenging task due to inter-dependencies of traffic flow both in time and space. Recently, deep learning techniques have shown significant prediction improvements over traditional models, however open questions remain around their applicability, accuracy and parameter tuning. This paper proposes an advanced deep learning framework for simultaneously predicting the traffic flow on a large number of monitoring stations along a highly circulated motorway in Sydney, Australia, including exit and entry loop count stations, and over varying training and prediction time horizons. The spatial and temporal features extracted from the 36.34 million data points are used in various deep learning architectures that exploit their spatial structure (convolutional neuronal networks), their temporal dynamics (recurrent neuronal networks), or both through a hybrid spatio-temporal modelling (CNN-LSTM). We show that our deep learning models consistently outperform traditional methods, and we conduct a comparative analysis of the optimal time horizon of historical data required to predict traffic flow at different time points in the future.