 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-Mode Structured Light 3D Imaging System with Multi-Source Information Fusion for Underwater Pipeline Detection
Dec 12, 2025



Underwater pipelines are highly susceptible to corrosion, which not only shorten their service life but also pose significant safety risks. Compared with manual inspection, the intelligent real-time imaging system for underwater pipeline detection has become a more reliable and practical solution. Among various underwater imaging techniques, structured light 3D imaging can restore the sufficient spatial detail for precise defect characterization. Therefore, this paper develops a multi-mode underwater structured light 3D imaging system for pipeline detection (UW-SLD system) based on multi-source information fusion. First, a rapid distortion correction (FDC) method is employed for efficient underwater image rectification. To overcome the challenges of extrinsic calibration among underwater sensors, a factor graph-based parameter optimization method is proposed to estimate the transformation matrix between the structured light and acoustic sensors. Furthermore, a multi-mode 3D imaging strategy is introduced to adapt to the geometric variability of underwater pipelines. Given the presence of numerous disturbances in underwater environments, a multi-source information fusion strategy and an adaptive extended Kalman filter (AEKF) are designed to ensure stable pose estimation and high-accuracy measurements. In particular, an edge detection-based ICP (ED-ICP) algorithm is proposed. This algorithm integrates pipeline edge detection network with enhanced point cloud registration to achieve robust and high-fidelity reconstruction of defect structures even under variable motion conditions. Extensive experiments are conducted under different operation modes, velocities, and depths. The results demonstrate that the developed system achieves superior accuracy, adaptability and robustness, providing a solid foundation for autonomous underwater pipeline detection.
Depth Ranging Performance Evaluation and Improvement for RGB-D Cameras on Field-Based High-Throughput Phenotyping Robots
Nov 02, 2020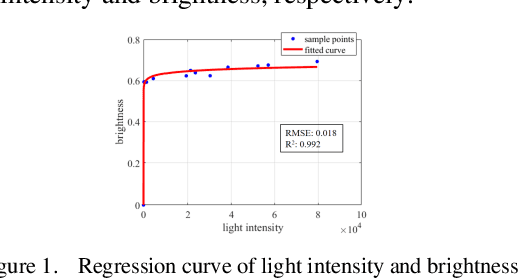
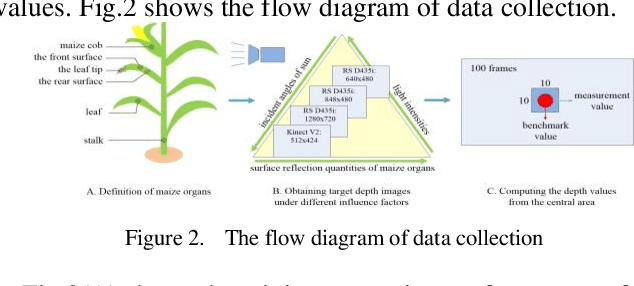
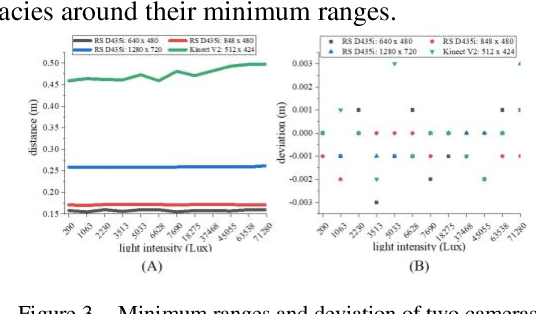
RGB-D cameras have been successfully used for indoor High-ThroughpuT Phenotyping (HTTP). However, their capability and feasibility for in-field HTTP still need to be evaluated, due to the noise and disturbances generated by unstable illumination, specular reflection, and diffuse reflection, etc. To solve these problems, we evaluated the depth-ranging performances of two consumer-level RGB-D cameras (RealSense D435i and Kinect V2) under in-field HTTP scenarios, and proposed a strategy to compensate the depth measurement error. For performance evaluation, we focused on determining their optimal ranging areas for different crop organs. Based on the evaluation results, we proposed a brightness-and-distance-based Support Vector Regression Strategy, to compensate the ranging error. Furthermore, we analyzed the depth filling rate of two RGB-D cameras under different lighting intensities. Experimental results showed that: 1) For RealSense D435i, its effective ranging area is [0.160, 1.400] m, and in-field filling rate is approximately 90%. 2) For Kinect V2, it has a high ranging accuracy in the [0.497, 1.200] m, but its in-field filling rate is less than 24.9%. 3) Our error compensation model can effectively reduce the influences of lighting intensity and target distance. The maximum MSE and minimum R2 of this model are 0.029 and 0.867, respectively. To sum up, RealSense D435i has better ranging performances than Kinect V2 on in-field HTTP.