 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-MLFFN: Multi-Level Autonomous Driving Behavior Feature Fusion via Large Language Model
Mar 03, 2026Accurate classification of autonomous vehicle (AV) driving behaviors is critical for safety validation, performance diagnosis, and traffic integration analysis. However, existing approaches primarily rely on numerical time-series modeling and often lack semantic abstraction, limiting interpretability and robustness in complex traffic environments. This paper presents LLM-MLFFN, a novel large language model (LLM)-enhanced multi-level feature fusion network designed to address the complexities of multi-dimensional driving data. The proposed LLM-MLFFN framework integrates priors from largescale pre-trained models and employs a multi-level approach to enhance classification accuracy. LLM-MLFFN comprises three core components: (1) a multi-level feature extraction module that extracts statistical, behavioral, and dynamic features to capture the quantitative aspects of driving behaviors; (2) a semantic description module that leverages LLMs to transform raw data into high-level semantic features; and (3) a dual-channel multi-level feature fusion network that combines numerical and semantic features using weighted attention mechanisms to improve robustness and prediction accuracy. Evaluation on the Waymo open trajectory dataset demonstrates the superior performance of the proposed LLM-MLFFN, achieving a classification accuracy of over 94%, surpassing existing machine learning models. Ablation studies further validate the critical contributions of multi-level fusion, feature extraction strategies, and LLM-derived semantic reasoning. These results suggest that integrating structured feature modeling with language-driven semantic abstraction provides a principled and interpretable pathway for robust autonomous driving behavior classification.
SVBRD-LLM: Self-Verifying Behavioral Rule Discovery for Autonomous Vehicle Identification
Nov 18, 2025As more autonomous vehicles operate on public roads, understanding real-world behavior of autonomous vehicles is critical to analyzing traffic safety, making policies, and public acceptance. This paper proposes SVBRD-LLM, a framework that automatically discovers, verifies, and applies interpretable behavioral rules from real traffic videos through zero-shot prompt engineering. The framework extracts vehicle trajectories using YOLOv8 and ByteTrack, computes kinematic features, and employs GPT-5 zero-shot prompting to compare autonomous and human-driven vehicles, generating 35 structured behavioral rule hypotheses. These rules are tested on a validation set, iteratively refined based on failure cases to filter spurious correlations, and compiled into a high-confidence rule library. The framework is evaluated on an independent test set for speed change prediction, lane change prediction, and autonomous vehicle identification tasks. Experiments on over 1500 hours of real traffic videos show that the framework achieves 90.0% accuracy and 93.3% F1-score in autonomous vehicle identification. The discovered rules clearly reveal distinctive characteristics of autonomous vehicles in speed control smoothness, lane change conservativeness, and acceleration stability, with each rule accompanied by semantic description, applicable context, and validation confidence.
Investigating the Spatiotemporal Charging Demand and Travel Behavior of Electric Vehicles Using GPS Data: A Machine Learning Approach
Feb 28, 2022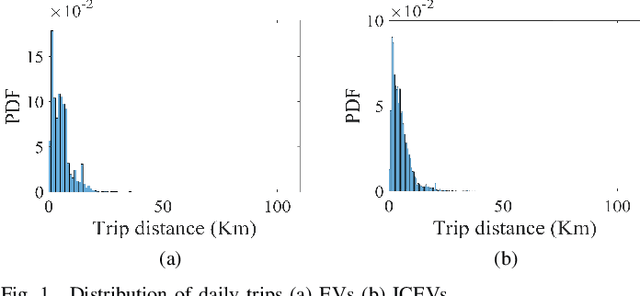
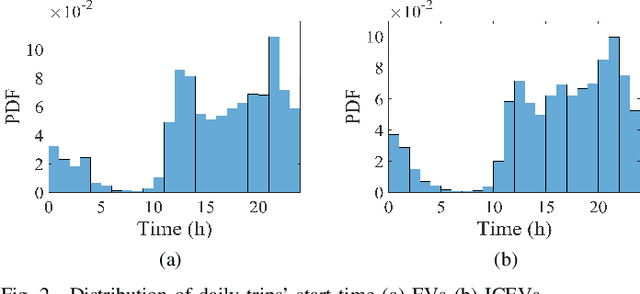
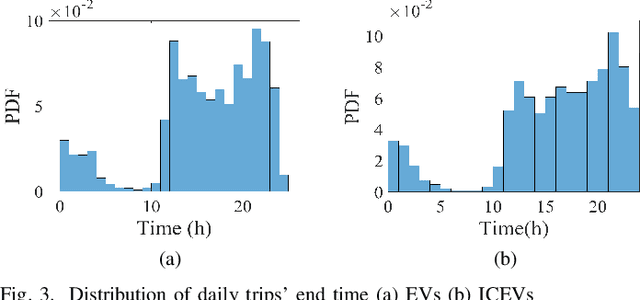
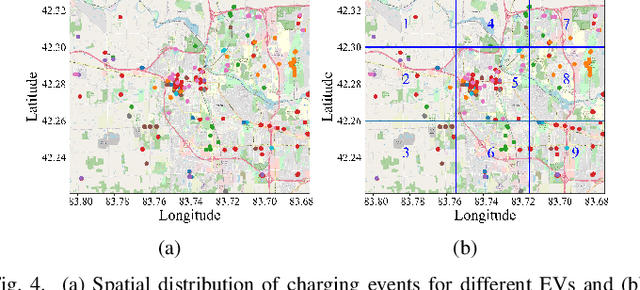
The increasing market penetration of electric vehicles (EVs) may change the travel behavior of drivers and pose a significant electricity demand on the power system. Since the electricity demand depends on the travel behavior of EVs, which are inherently uncertain, the forecasting of daily charging demand (CD) will be a challenging task. In this paper, we use the recorded GPS data of EVs and conventional gasoline-powered vehicles from the same city to investigate the potential shift in the travel behavior of drivers from conventional vehicles to EVs and forecast the spatiotemporal patterns of daily CD. Our analysis reveals that the travel behavior of EVs and conventional vehicles are similar. Also, the forecasting results indicate that the developed models can generate accurate spatiotemporal patterns of the daily CD.
Analyzing the Travel and Charging Behavior of Electric Vehicles -- A Data-driven Approach
Jun 11, 2021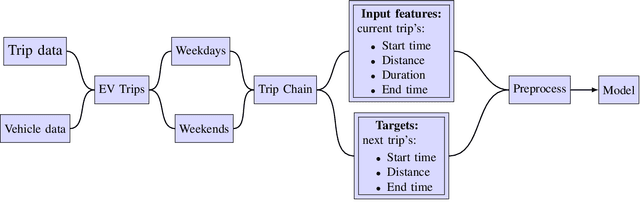
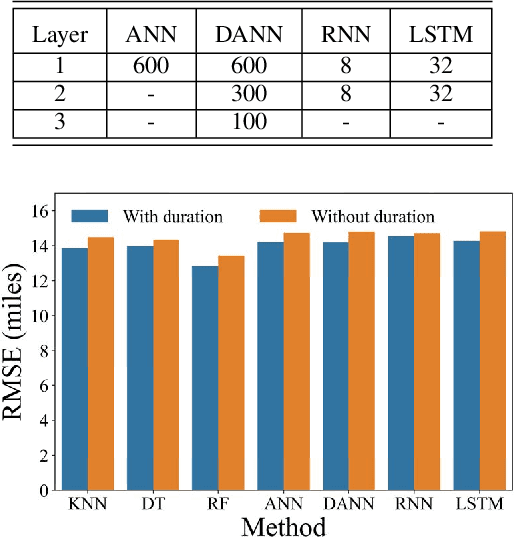
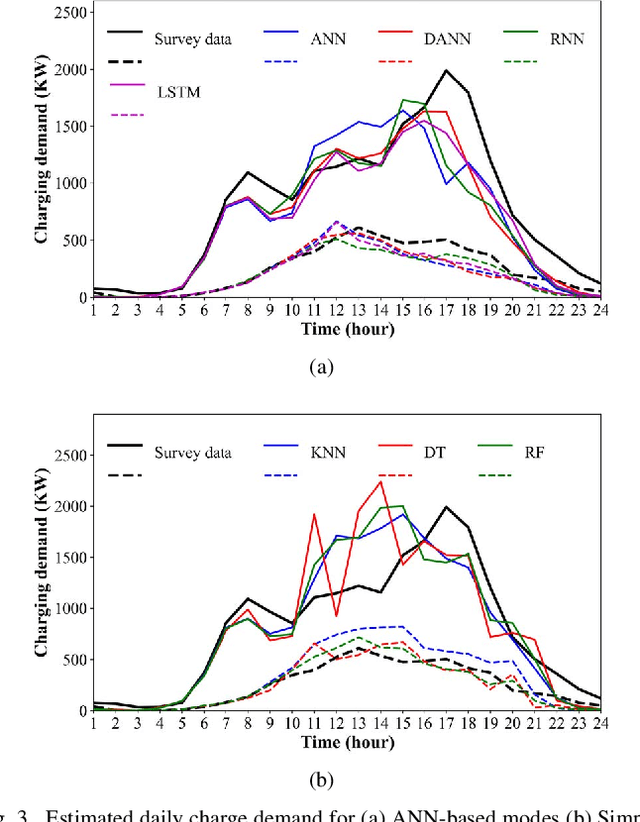
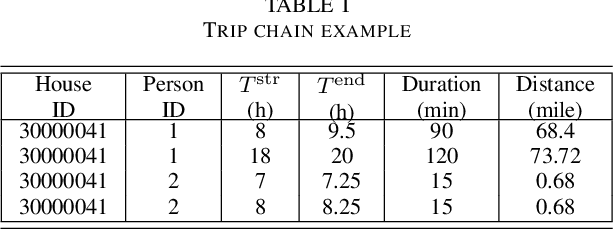
The increasing market penetration of electric vehicles (EVs) may pose significant electricity demand on power systems. This electricity demand is affected by the inherent uncertainties of EVs' travel behavior that makes forecasting the daily charging demand (CD) very challenging. In this project, we use the National House Hold Survey (NHTS) data to form sequences of trips, and develop machine learning models to predict the parameters of the next trip of the drivers, including trip start time, end time, and distance. These parameters are later used to model the temporal charging behavior of EVs. The simulation results show that the proposed modeling can effectively estimate the daily CD pattern based on travel behavior of EVs, and simple machine learning techniques can forecast the travel parameters with acceptable accuracy.