 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLightweight Low-Light Image Enhancement via Distribution-Normalizing Preprocessing and Depthwise U-Net
Apr 14, 2026We present a lightweight two-stage framework for low-light image enhancement (LLIE) that achieves competitive perceptual quality with significantly fewer parameters than existing methods. Our approach combines frozen algorithm-based preprocessing with a compact U-Net built entirely from depthwise-separable convolutions. The preprocessing normalizes the input distribution by providing complementary brightness-corrected views, enabling the trainable network to focus on residual color correction. Our method achieved 4th place in the CVPR 2026 NTIRE Efficient Low-Light Image Enhancement Challenge. We further provide extended benchmarks and ablations to demonstrate the general effectiveness of our methods.
Revisiting Shape from Polarization in the Era of Vision Foundation Models
Mar 05, 2026We show that, with polarization cues, a lightweight model trained on a small dataset can outperform RGB-only vision foundation models (VFMs) in single-shot object-level surface normal estimation. Shape from polarization (SfP) has long been studied due to the strong physical relationship between polarization and surface geometry. Meanwhile, driven by scaling laws, RGB-only VFMs trained on large datasets have recently achieved impressive performance and surpassed existing SfP methods. This situation raises questions about the necessity of polarization cues, which require specialized hardware and have limited training data. We argue that the weaker performance of prior SfP methods does not come from the polarization modality itself, but from domain gaps. These domain gaps mainly arise from two sources. First, existing synthetic datasets use limited and unrealistic 3D objects, with simple geometry and random texture maps that do not match the underlying shapes. Second, real-world polarization signals are often affected by sensor noise, which is not well modeled during training. To address the first issue, we render a high-quality polarization dataset using 1,954 3D-scanned real-world objects. We further incorporate pretrained DINOv3 priors to improve generalization to unseen objects. To address the second issue, we introduce polarization sensor-aware data augmentation that better reflects real-world conditions. With only 40K training scenes, our method significantly outperforms both state-of-the-art SfP approaches and RGB-only VFMs. Extensive experiments show that polarization cues enable a 33x reduction in training data or an 8x reduction in model parameters, while still achieving better performance than RGB-only counterparts.
Revisiting Disparity from Dual-Pixel Images: Physics-Informed Lightweight Depth Estimation
Nov 06, 2024



In this study, we propose a high-performance disparity (depth) estimation method using dual-pixel (DP) images with few parameters. Conventional end-to-end deep-learning methods have many parameters but do not fully exploit disparity constraints, which limits their performance. Therefore, we propose a lightweight disparity estimation method based on a completion-based network that explicitly constrains disparity and learns the physical and systemic disparity properties of DP. By modeling the DP-specific disparity error parametrically and using it for sampling during training, the network acquires the unique properties of DP and enhances robustness. This learning also allows us to use a common RGB-D dataset for training without a DP dataset, which is labor-intensive to acquire. Furthermore, we propose a non-learning-based refinement framework that efficiently handles inherent disparity expansion errors by appropriately refining the confidence map of the network output. As a result, the proposed method achieved state-of-the-art results while reducing the overall system size to 1/5 of that of the conventional method, even without using the DP dataset for training, thereby demonstrating its effectiveness. The code and dataset are available on our project site.
NeISF: Neural Incident Stokes Field for Geometry and Material Estimation
Nov 29, 2023



Multi-view inverse rendering is the problem of estimating the scene parameters such as shapes, materials, or illuminations from a sequence of images captured under different viewpoints. Many approaches, however, assume single light bounce and thus fail to recover challenging scenarios like inter-reflections. On the other hand, simply extending those methods to consider multi-bounced light requires more assumptions to alleviate the ambiguity. To address this problem, we propose Neural Incident Stokes Fields (NeISF), a multi-view inverse rendering framework that reduces ambiguities using polarization cues. The primary motivation for using polarization cues is that it is the accumulation of multi-bounced light, providing rich information about geometry and material. Based on this knowledge, the proposed incident Stokes field efficiently models the accumulated polarization effect with the aid of an original physically-based differentiable polarimetric renderer. Lastly, experimental results show that our method outperforms the existing works in synthetic and real scenarios.
Simultaneous Acquisition of High Quality RGB Image and Polarization Information using a Sparse Polarization Sensor
Sep 27, 2022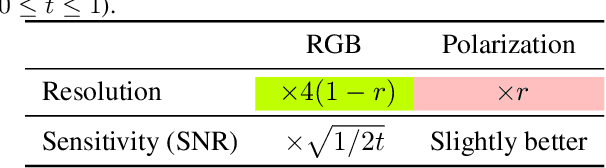
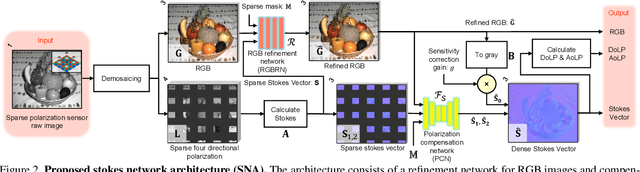
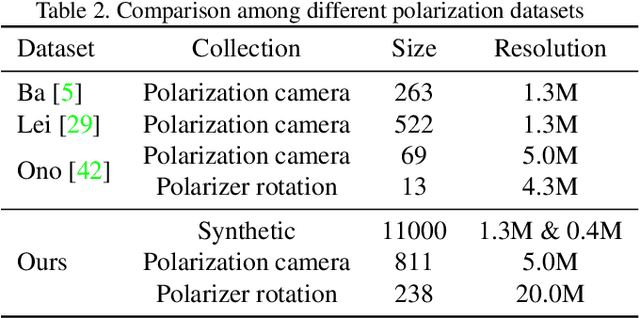
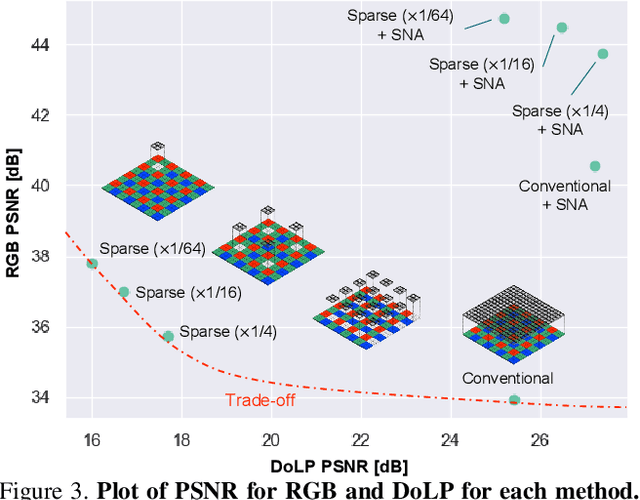
This paper proposes a novel polarization sensor structure and network architecture to obtain a high-quality RGB image and polarization information. Conventional polarization sensors can simultaneously acquire RGB images and polarization information, but the polarizers on the sensor degrade the quality of the RGB images. There is a trade-off between the quality of the RGB image and polarization information as fewer polarization pixels reduce the degradation of the RGB image but decrease the resolution of polarization information. Therefore, we propose an approach that resolves the trade-off by sparsely arranging polarization pixels on the sensor and compensating for low-resolution polarization information with higher resolution using the RGB image as a guide. Our proposed network architecture consists of an RGB image refinement network and a polarization information compensation network. We confirmed the superiority of our proposed network in compensating the differential component of polarization intensity by comparing its performance with state-of-the-art methods for similar tasks: depth completion. Furthermore, we confirmed that our approach could simultaneously acquire higher quality RGB images and polarization information than conventional polarization sensors, resolving the trade-off between the quality of RGB images and polarization information. The baseline code and newly generated real and synthetic large-scale polarization image datasets are available for further research and development.