 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Passive Elastic-Folding Mechanism for Stackable Airdrop Sensors
Mar 19, 2026Air-dispersed sensor networks deployed from aerial robotic systems (e.g., UAVs) provide a low-cost approach to wide-area environmental monitoring. However, existing methods often rely on active actuators for mid-air shape or trajectory control, increasing both power consumption and system cost. Here, we introduce a passive elastic-folding hinge mechanism that transforms sensors from a flat, stackable form into a three-dimensional structure upon release. Hinges are fabricated by laminating commercial sheet materials with rigid printed circuit boards (PCBs) and programming fold angles through a single oven-heating step, enabling scalable production without specialized equipment. Our geometric model links laminate geometry, hinge mechanics, and resulting fold angle, providing a predictive design methodology for target configurations. Laboratory tests confirmed fold angles between 10 degrees and 100 degrees, with a standard deviation of 4 degrees and high repeatability. Field trials further demonstrated reliable data collection and LoRa transmission during dispersion, while the Horizontal Wind Model (HWM)-based trajectory simulations indicated strong potential for wide-area sensing exceeding 10 km.
Magnetic field estimation using Gaussian process regression for interactive wireless power system design
Oct 22, 2025Wireless power transfer (WPT) with coupled resonators offers a promising solution for the seamless powering of electronic devices. Interactive design approaches that visualize the magnetic field and power transfer efficiency based on system geometry adjustments can facilitate the understanding and exploration of the behavior of these systems for dynamic applications. However, typical electromagnetic field simulation methods, such as the Method of Moments (MoM), require significant computational resources, limiting the rate at which computation can be performed for acceptable interactivity. Furthermore, the system's sensitivity to positional and geometrical changes necessitates a large number of simulations, and structures such as ferromagnetic shields further complicate these simulations. Here, we introduce a machine learning approach using Gaussian Process Regression (GPR), demonstrating for the first time the rapid estimation of the entire magnetic field and power transfer efficiency for near-field coupled systems. To achieve quick and accurate estimation, we develop 3D adaptive grid systems and an active learning strategy to effectively capture the nonlinear interactions between complex system geometries and magnetic fields. By training a regression model, our approach achieves magnetic field computation with sub-second latency and with an average error of less than 6% when validated against independent electromagnetic simulation results.
Joint-repositionable Inner-wireless Planar Snake Robot
Nov 21, 2024



Bio-inspired multi-joint snake robots offer the advantages of terrain adaptability due to their limbless structure and high flexibility. However, a series of dozens of motor units in typical multiple-joint snake robots results in a heavy body structure and hundreds of watts of high power consumption. This paper presents a joint-repositionable, inner-wireless snake robot that enables multi-joint-like locomotion using a low-powered underactuated mechanism. The snake robot, consisting of a series of flexible passive links, can dynamically change its joint coupling configuration by repositioning motor-driven joint units along rack gears inside the robot. Additionally, a soft robot skin wirelessly powers the internal joint units, avoiding the risk of wire tangling and disconnection caused by the movable joint units. The combination of the joint-repositionable mechanism and the wireless-charging-enabled soft skin achieves a high degree of bending, along with a lightweight structure of 1.3 kg and energy-efficient wireless power transmission of 7.6 watts.
Building a Computer Mahjong Player via Deep Convolutional Neural Networks
Jun 07, 2019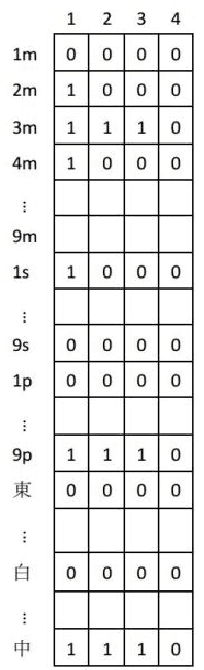
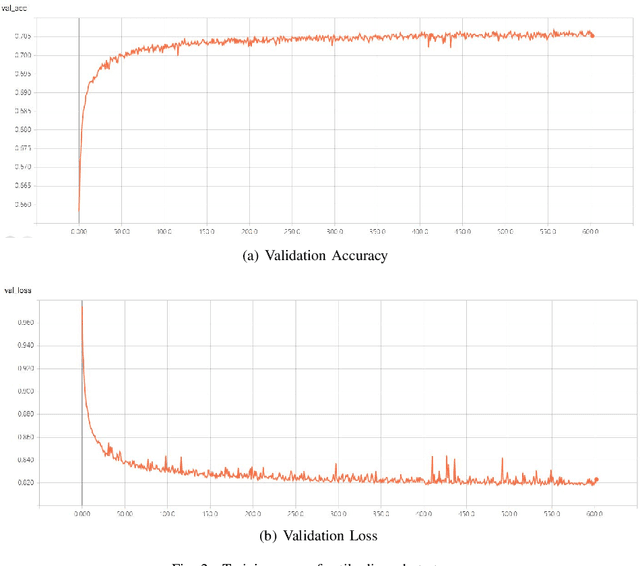
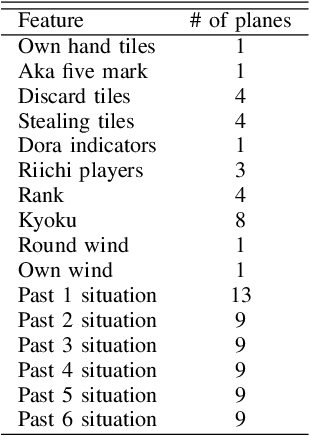
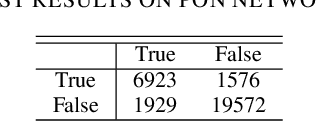
The evaluation function for imperfect information games is always hard to define but owns a significant impact on the playing strength of a program. Deep learning has made great achievements these years, and already exceeded the top human players' level even in the game of Go. In this paper, we introduce a new data model to represent the available imperfect information on the game table, and construct a well-designed convolutional neural network for game record training. We choose the accuracy of tile discarding which is also called as the agreement rate as the benchmark for this study. Our accuracy on test data reaches 70.44%, while the state-of-art baseline is 62.1% reported by Mizukami and Tsuruoka (2015), and is significantly higher than previous trials using deep learning, which shows the promising potential of our new model. For the AI program building, besides the tile discarding strategy, we adopt similar predicting strategies for other actions such as stealing (pon, chi, and kan) and riichi. With the simple combination of these several predicting networks and without any knowledge about the concrete rules of the game, a strength evaluation is made for the resulting program on the largest Japanese Mahjong site `Tenhou'. The program has achieved a rating of around 1850, which is significantly higher than that of an average human player and of programs among past studies.