 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformers for Program Termination
Mar 25, 2026Determining whether a program terminates is a core challenge in program analysis with direct implications for correctness, verification, and security. We investigate whether transformer architectures can recognise termination patterns directly from source code and how their strengths can be amplified through ensembles. To overcome the extreme scarcity of non-terminating examples, we design an ensemble framework of compact transformer encoders, systematically trained with a suite of imbalance-aware loss functions and class-aware sampling techniques. By combining models trained with distinct loss functions, our ensembles achieve substantially stronger performance than any single transformer, outperforming both powerful off-the-shelf LLMs and graph-based methods. Finally, we introduce an attribution pipeline that produces syntax-aware explanations for the termination estimation.
Using Graph Neural Networks for Program Termination
Jul 28, 2022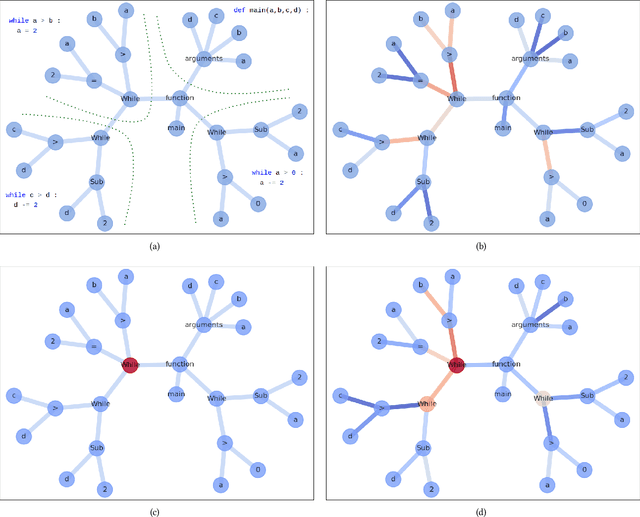
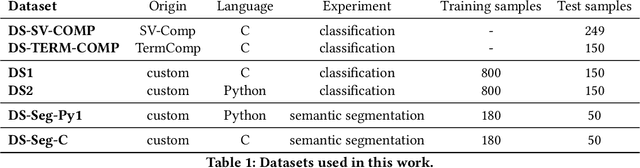
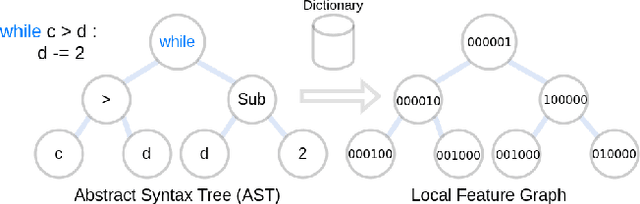
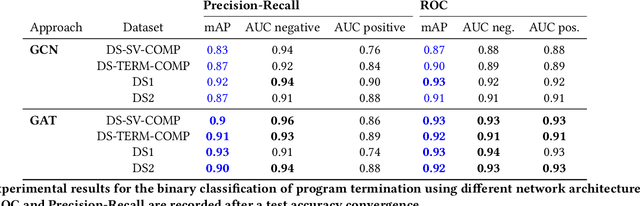
Termination analyses investigate the termination behavior of programs, intending to detect nontermination, which is known to cause a variety of program bugs (e.g. hanging programs, denial-of-service vulnerabilities). Beyond formal approaches, various attempts have been made to estimate the termination behavior of programs using neural networks. However, the majority of these approaches continue to rely on formal methods to provide strong soundness guarantees and consequently suffer from similar limitations. In this paper, we move away from formal methods and embrace the stochastic nature of machine learning models. Instead of aiming for rigorous guarantees that can be interpreted by solvers, our objective is to provide an estimation of a program's termination behavior and of the likely reason for nontermination (when applicable) that a programmer can use for debugging purposes. Compared to previous approaches using neural networks for program termination, we also take advantage of the graph representation of programs by employing Graph Neural Networks. To further assist programmers in understanding and debugging nontermination bugs, we adapt the notions of attention and semantic segmentation, previously used for other application domains, to programs. Overall, we designed and implemented classifiers for program termination based on Graph Convolutional Networks and Graph Attention Networks, as well as a semantic segmentation Graph Neural Network that localizes AST nodes likely to cause nontermination. We also illustrated how the information provided by semantic segmentation can be combined with program slicing to further aid debugging.
Neuroplastic graph attention networks for nuclei segmentation in histopathology images
Jan 10, 2022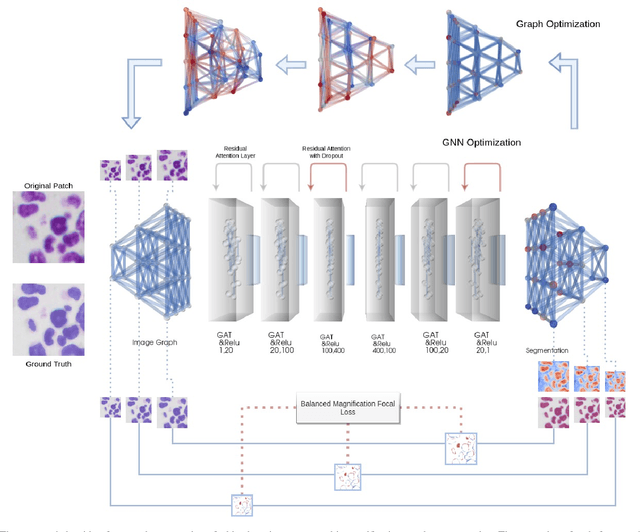
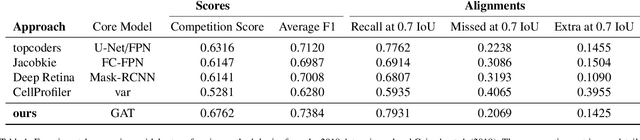
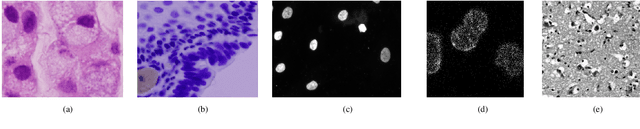
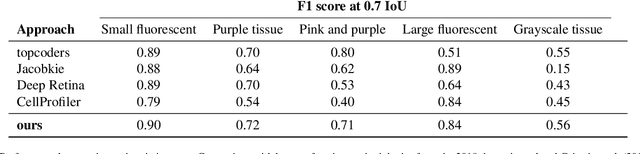
Modern histopathological image analysis relies on the segmentation of cell structures to derive quantitative metrics required in biomedical research and clinical diagnostics. State-of-the-art deep learning approaches predominantly apply convolutional layers in segmentation and are typically highly customized for a specific experimental configuration; often unable to generalize to unknown data. As the model capacity of classical convolutional layers is limited by a finite set of learned kernels, our approach uses a graph representation of the image and focuses on the node transitions in multiple magnifications. We propose a novel architecture for semantic segmentation of cell nuclei robust to differences in experimental configuration such as staining and variation of cell types. The architecture is comprised of a novel neuroplastic graph attention network based on residual graph attention layers and concurrent optimization of the graph structure representing multiple magnification levels of the histopathological image. The modification of graph structure, which generates the node features by projection, is as important to the architecture as the graph neural network itself. It determines the possible message flow and critical properties to optimize attention, graph structure, and node updates in a balanced magnification loss. In experimental evaluation, our framework outperforms ensembles of state-of-the-art neural networks, with a fraction of the neurons typically required, and sets new standards for the segmentation of new nuclei datasets.
Synthetic Generation of Three-Dimensional Cancer Cell Models from Histopathological Images
Feb 08, 2021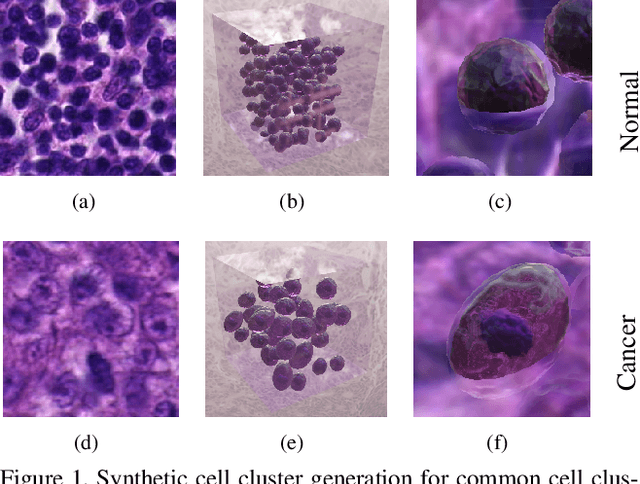
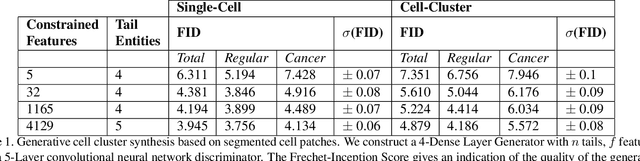
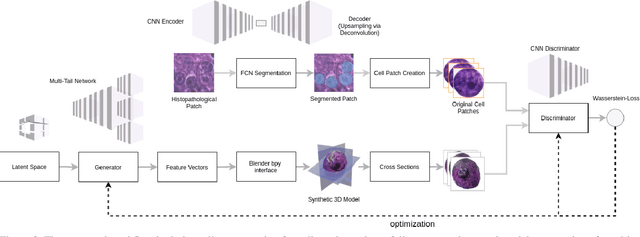
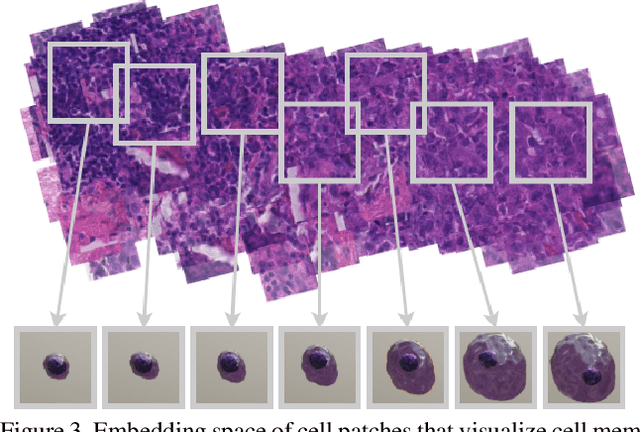
Synthetic generation of three-dimensional cell models from histopathological images aims to enhance understanding of cell mutation, and progression of cancer, necessary for clinical assessment and optimal treatment. Classical reconstruction algorithms based on image registration of consecutive slides of stained tissues are prone to errors and often not suitable for the training of three-dimensional segmentation algorithms. We propose a novel framework to generate synthetic three-dimensional histological models based on a generator-discriminator pattern optimizing constrained features that construct a 3D model via a Blender interface exploiting smooth shape continuity typical for biological specimens. To capture the spatial context of entire cell clusters we deploy a novel deep topology transformer that implements and attention mechanism on cell group images to extract features for the frozen feature decoder. The proposed algorithms achieves high quantitative and qualitative synthesis evident in comparative evaluation metrics such as a low Frechet-Inception scores.
Multi-Agent Reinforcement Learning for Unmanned Aerial Vehicle Coordination by Multi-Critic Policy Gradient Optimization
Dec 31, 2020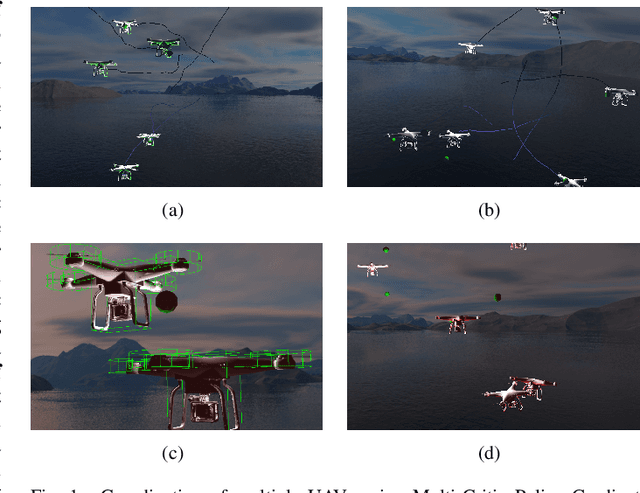
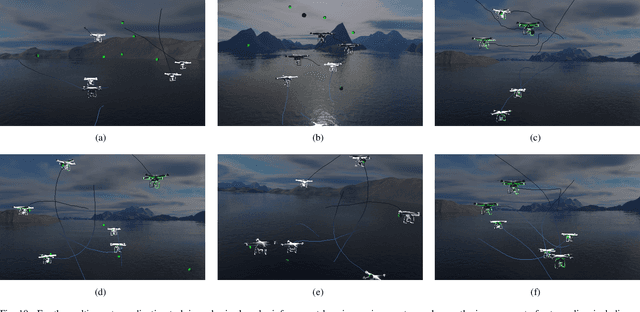
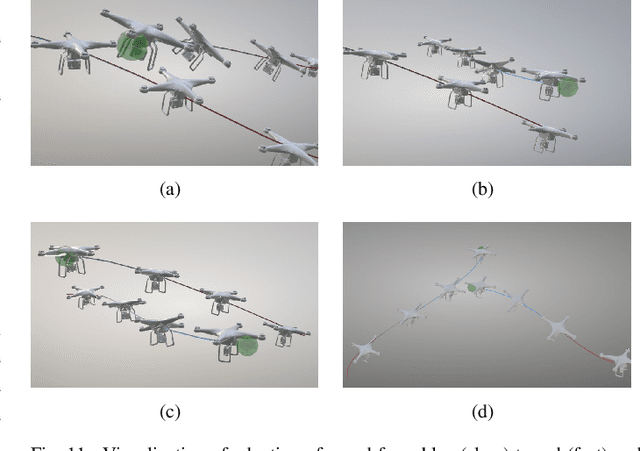
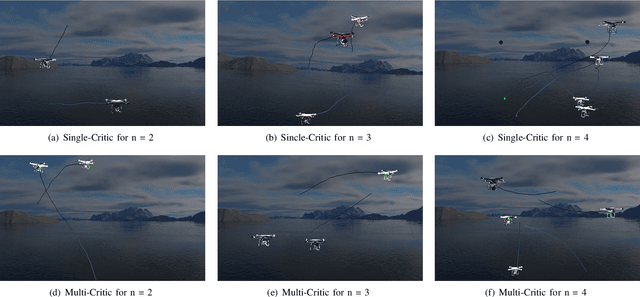
Recent technological progress in the development of Unmanned Aerial Vehicles (UAVs) together with decreasing acquisition costs make the application of drone fleets attractive for a wide variety of tasks. In agriculture, disaster management, search and rescue operations, commercial and military applications, the advantage of applying a fleet of drones originates from their ability to cooperate autonomously. Multi-Agent Reinforcement Learning approaches that aim to optimize a neural network based control policy, such as the best performing actor-critic policy gradient algorithms, struggle to effectively back-propagate errors of distinct rewards signal sources and tend to favor lucrative signals while neglecting coordination and exploitation of previously learned similarities. We propose a Multi-Critic Policy Optimization architecture with multiple value estimating networks and a novel advantage function that optimizes a stochastic actor policy network to achieve optimal coordination of agents. Consequently, we apply the algorithm to several tasks that require the collaboration of multiple drones in a physics-based reinforcement learning environment. Our approach achieves a stable policy network update and similarity in reward signal development for an increasing number of agents. The resulting policy achieves optimal coordination and compliance with constraints such as collision avoidance.