 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRAFTO: Decoupled Reduced-space and Adaptive Feasibility-repair Trajectory Optimization for Robotic Manipulators
Mar 10, 2026This paper introduces a new algorithm for trajectory optimization, Decoupled Reduced-space and Adaptive Feasibility-repair Trajectory Optimization (DRAFTO). It first constructs a constrained objective that accounts for smoothness, safety, joint limits, and task requirements. Then, it optimizes the coefficients, which are the coordinates of a set of basis functions for trajectory parameterization. To reduce the number of repeated constrained optimizations while handling joint-limit feasibility, the optimization is decoupled into a reduced-space Gauss-Newton (GN) descent for the main iterations and constrained quadratic programming for initialization and terminal feasibility repair. The two-phase acceptance rule with a non-monotone policy is applied to the GN model, which uses a hinge-squared penalty for inequality constraints, to ensure globalizability. The results of our benchmark tests against optimization-based planners, such as CHOMP, TrajOpt, GPMP2, and FACTO, and sampling-based planners, such as RRT-Connect, RRT*, and PRM, validate the high efficiency and reliability across diverse scenarios and tasks. The experiment involving grabbing an object from a drawer further demonstrates the potential for implementation in complex manipulation tasks. The supplemental video is available at https://youtu.be/XisFI37YyTQ.
FACTO: Function-space Adaptive Constrained Trajectory Optimization for Robotic Manipulators
Feb 23, 2026This paper introduces Function-space Adaptive Constrained Trajectory Optimization (FACTO), a new trajectory optimization algorithm for both single- and multi-arm manipulators. Trajectory representations are parameterized as linear combinations of orthogonal basis functions, and optimization is performed directly in the coefficient space. The constrained problem formulation consists of both an objective functional and a finite-dimensional objective defined over truncated coefficients. To address nonlinearity, FACTO uses a Gauss-Newton approximation with exponential moving averaging, yielding a smoothed quadratic subproblem. Trajectory-wide constraints are addressed using coefficient-space mappings, and an adaptive constrained update using the Levenberg-Marquardt algorithm is performed in the null space of active constraints. Comparisons with optimization-based planners (CHOMP, TrajOpt, GPMP2) and sampling-based planners (RRT-Connect, RRT*, PRM) show the improved solution quality and feasibility, especially in constrained single- and multi-arm scenarios. The experimental evaluation of FACTO on Franka robots verifies the feasibility of deployment.
Incrementally Stochastic and Accelerated Gradient Information mixed Optimization for Manipulator Motion Planning
Aug 21, 2021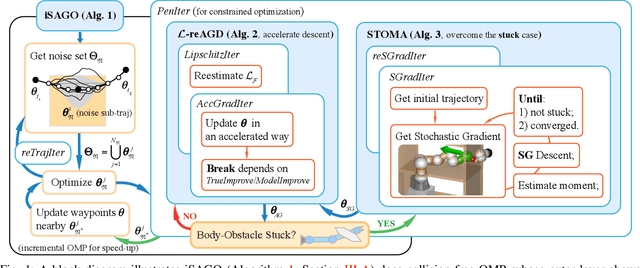
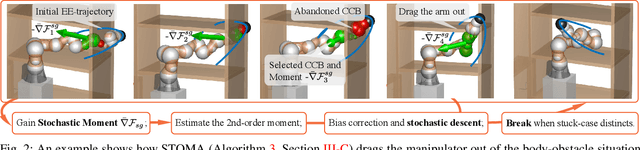
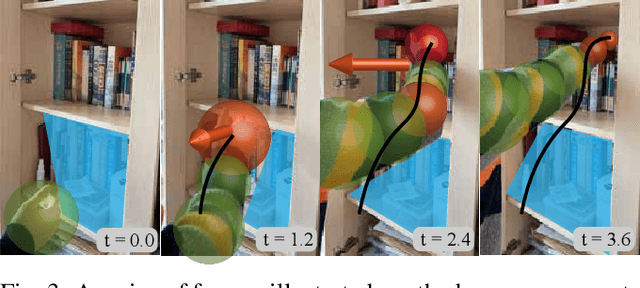
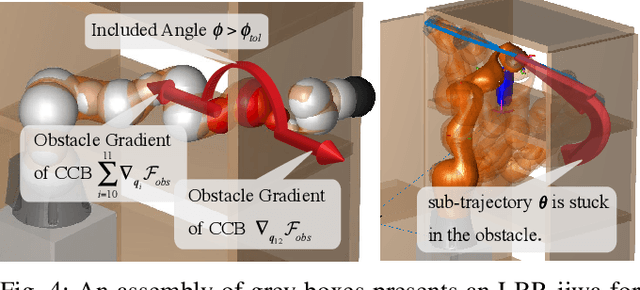
This paper introduces a novel motion planning algorithm, incrementally stochastic and accelerated gradient information mixed optimization (iSAGO), for robotic manipulators in a narrow workspace. Primarily, we propose the overall scheme of iSAGO integrating the accelerated and stochastic gradient information for efficient descent in the penalty method. In the stochastic part, we generate the adaptive stochastic moment via the random selection of collision checkboxes, interval time-series, and penalty factor based on Adam to solve the body-obstacle stuck case. Due to the slow convergence of STOMA, we integrate the accelerated gradient and stimulate the descent rate in a Lipschitz constant reestimation framework. Moreover, we introduce the Bayesian tree inference (BTI) method, transforming the whole trajectory optimization (SAGO) into an incremental sub-trajectory optimization (iSAGO) to improve the computational efficiency and success rate. Finally, we demonstrate the key coefficient tuning, benchmark iSAGO against other planners (CHOMP, GPMP2, TrajOpt, STOMP, and RRT-Connect), and implement iSAGO on AUBO-i5 in a storage shelf. The result shows the highest success rate and moderate solving efficiency of iSAGO.