 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTIBR4D: Tracing-Guided Iterative Boundary Refinement for Efficient 4D Gaussian Segmentation
Feb 09, 2026Object-level segmentation in dynamic 4D Gaussian scenes remains challenging due to complex motion, occlusions, and ambiguous boundaries. In this paper, we present an efficient learning-free 4D Gaussian segmentation framework that lifts video segmentation masks to 4D spaces, whose core is a two-stage iterative boundary refinement, TIBR4D. The first stage is an Iterative Gaussian Instance Tracing (IGIT) at the temporal segment level. It progressively refines Gaussian-to-instance probabilities through iterative tracing, and extracts corresponding Gaussian point clouds that better handle occlusions and preserve completeness of object structures compared to existing one-shot threshold-based methods. The second stage is a frame-wise Gaussian Rendering Range Control (RCC) via suppressing highly uncertain Gaussians near object boundaries while retaining their core contributions for more accurate boundaries. Furthermore, a temporal segmentation merging strategy is proposed for IGIT to balance identity consistency and dynamic awareness. Longer segments enforce stronger multi-frame constraints for stable identities, while shorter segments allow identity changes to be captured promptly. Experiments on HyperNeRF and Neu3D demonstrate that our method produces accurate object Gaussian point clouds with clearer boundaries and higher efficiency compared to SOTA methods.
3D Instance Segmentation of MVS Buildings
Dec 18, 2021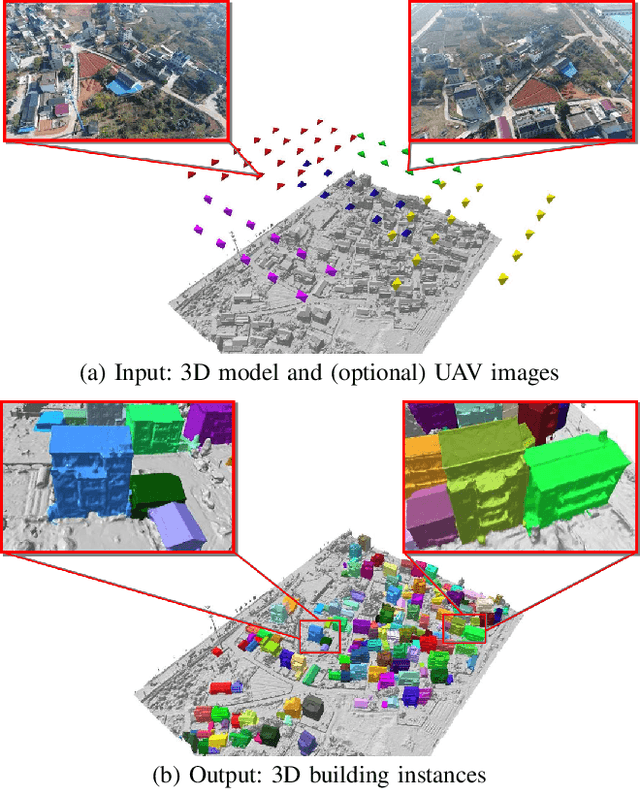
We present a novel framework for instance segmentation of 3D buildings from Multi-view Stereo (MVS) urban scenes. Unlike existing works focusing on semantic segmentation of an urban scene, the emphasis of this work lies in detecting and segmenting 3D building instances even if they are attached and embedded in a large and imprecise 3D surface model. Multi-view RGB images are first enhanced to RGBH images by adding a heightmap and are segmented to obtain all roof instances using a fine-tuned 2D instance segmentation neural network. Roof instance masks from different multi-view images are then clustered into global masks. Our mask clustering accounts for spatial occlusion and overlapping, which can eliminate segmentation ambiguities among multi-view images. Based on these global masks, 3D roof instances are segmented out by mask back-projections and extended to the entire building instances through a Markov random field (MRF) optimization. Quantitative evaluations and ablation studies have shown the effectiveness of all major steps of the method. A dataset for the evaluation of instance segmentation of 3D building models is provided as well. To the best of our knowledge, it is the first dataset for 3D urban buildings on the instance segmentation level.