 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-distance tiny face detection based on enhanced YOLOv3 for unmanned system
Oct 09, 2020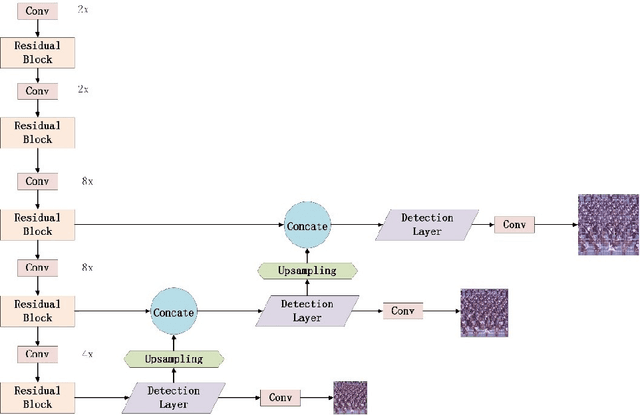
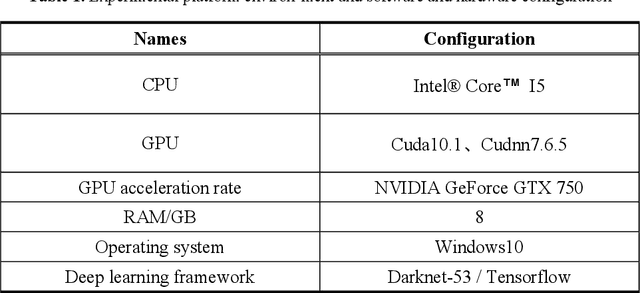
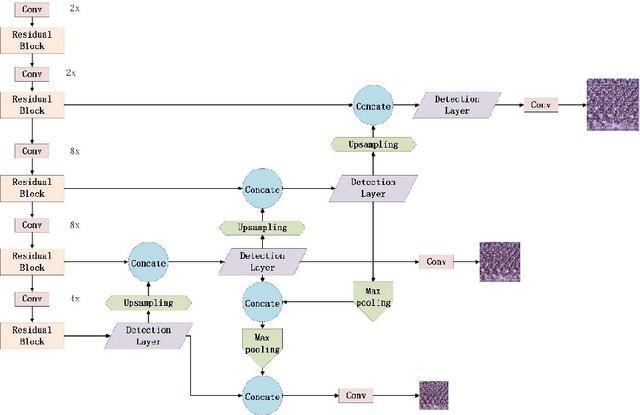
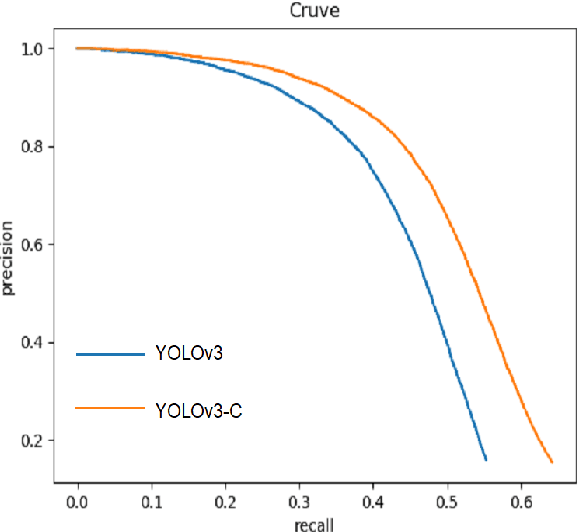
Remote tiny face detection applied in unmanned system is a challeng-ing work. The detector cannot obtain sufficient context semantic information due to the relatively long distance. The received poor fine-grained features make the face detection less accurate and robust. To solve the problem of long-distance detection of tiny faces, we propose an enhanced network model (YOLOv3-C) based on the YOLOv3 algorithm for unmanned platform. In this model, we bring in multi-scale features from feature pyramid networks and make the features fu-sion to adjust prediction feature map of the output, which improves the sensitivity of the entire algorithm for tiny target faces. The enhanced model improves the accuracy of tiny face detection in the cases of long-distance and high-density crowds. The experimental evaluation results demonstrated the superior perfor-mance of the proposed YOLOv3-C in comparison with other relevant detectors in remote tiny face detection. It is worth mentioning that our proposed method achieves comparable performance with the state of the art YOLOv4[1] in the tiny face detection tasks.
Enhanced Biologically Inspired Model for Image Recognition Based on a Novel Patch Selection Method with Moment
Oct 27, 2017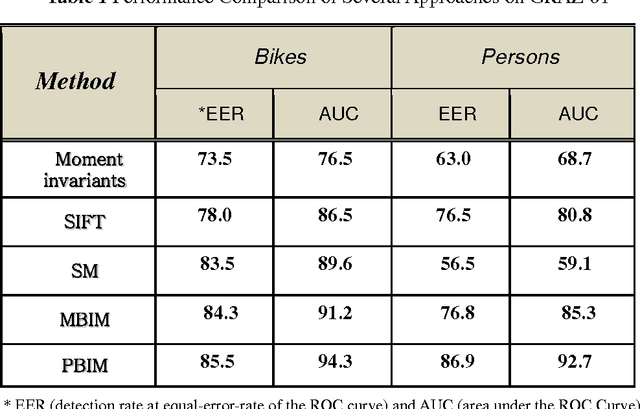
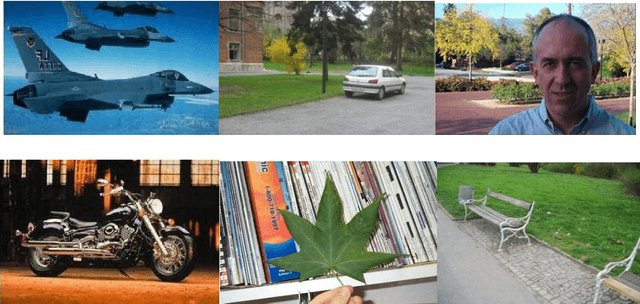
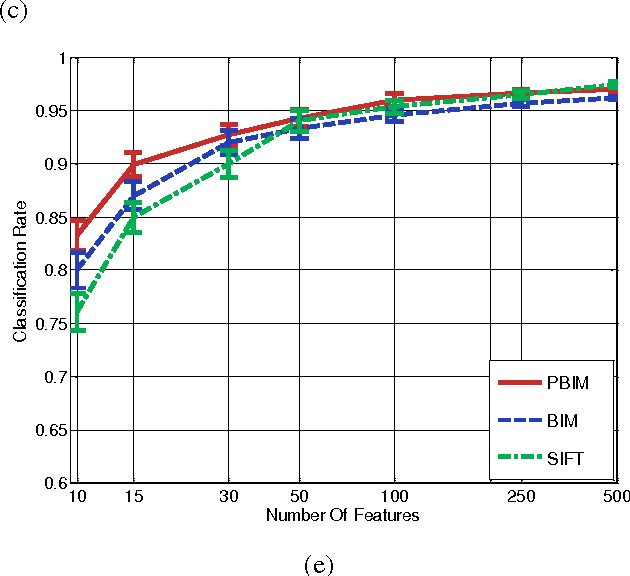
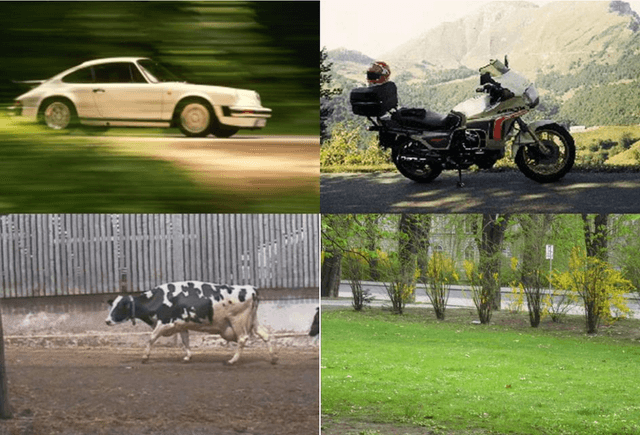
Biologically inspired model (BIM) for image recognition is a robust computational architecture, which has attracted widespread attention. BIM can be described as a four-layer structure based on the mechanisms of the visual cortex. Although the performance of BIM for image recognition is robust, it takes the randomly selected ways for the patch selection, which is sightless, and results in heavy computing burden. To address this issue, we propose a novel patch selection method with oriented Gaussian-Hermite moment (PSGHM), and we enhanced the BIM based on the proposed PSGHM, named as PBIM. In contrast to the conventional BIM which adopts the random method to select patches within the feature representation layers processed by multi-scale Gabor filter banks, the proposed PBIM takes the PSGHM way to extract a small number of representation features while offering promising distinctiveness. To show the effectiveness of the proposed PBIM, experimental studies on object categorization are conducted on the CalTech05, TU Darmstadt (TUD), and GRAZ01 databases. Experimental results demonstrate that the performance of PBIM is a significant improvement on that of the conventional BIM.