 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Causal Discovery under Imperfect Structural Constraints
Nov 10, 2025



Robust causal discovery from observational data under imperfect prior knowledge remains a significant and largely unresolved challenge. Existing methods typically presuppose perfect priors or can only handle specific, pre-identified error types. And their performance degrades substantially when confronted with flawed constraints of unknown location and type. This decline arises because most of them rely on inflexible and biased thresholding strategies that may conflict with the data distribution. To overcome these limitations, we propose to harmonizes knowledge and data through prior alignment and conflict resolution. First, we assess the credibility of imperfect structural constraints through a surrogate model, which then guides a sparse penalization term measuring the loss between the learned and constrained adjacency matrices. We theoretically prove that, under ideal assumption, the knowledge-driven objective aligns with the data-driven objective. Furthermore, to resolve conflicts when this assumption is violated, we introduce a multi-task learning framework optimized via multi-gradient descent, jointly minimizing both objectives. Our proposed method is robust to both linear and nonlinear settings. Extensive experiments, conducted under diverse noise conditions and structural equation model types, demonstrate the effectiveness and efficiency of our method under imperfect structural constraints.
Asynchronous Curriculum Experience Replay: A Deep Reinforcement Learning Approach for UAV Autonomous Motion Control in Unknown Dynamic Environments
Jul 04, 2022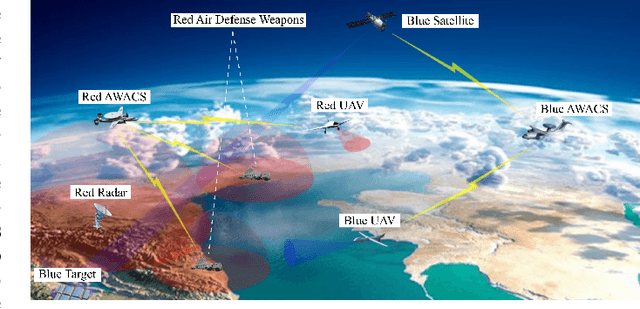
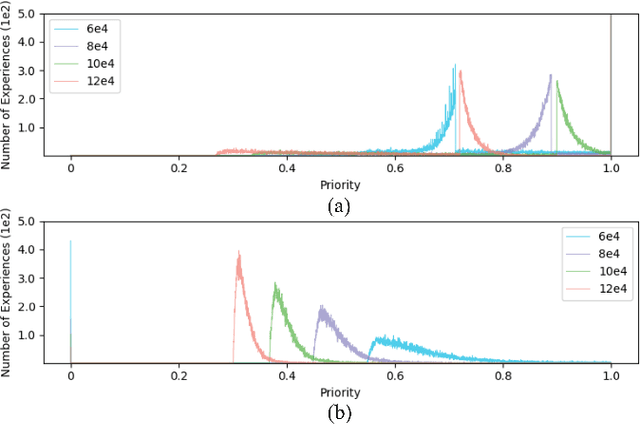

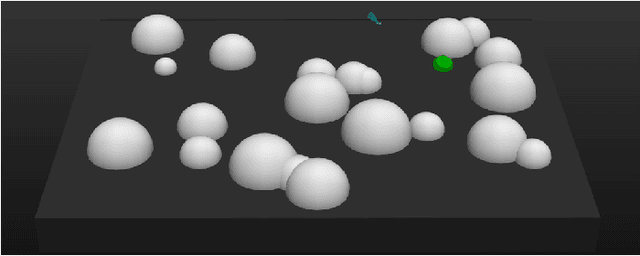
Unmanned aerial vehicles (UAVs) have been widely used in military warfare. In this paper, we formulate the autonomous motion control (AMC) problem as a Markov decision process (MDP) and propose an advanced deep reinforcement learning (DRL) method that allows UAVs to execute complex tasks in large-scale dynamic three-dimensional (3D) environments. To overcome the limitations of the prioritized experience replay (PER) algorithm and improve performance, the proposed asynchronous curriculum experience replay (ACER) uses multithreads to asynchronously update the priorities, assigns the true priorities and applies a temporary experience pool to make available experiences of higher quality for learning. A first-in-useless-out (FIUO) experience pool is also introduced to ensure the higher use value of the stored experiences. In addition, combined with curriculum learning (CL), a more reasonable training paradigm of sampling experiences from simple to difficult is designed for training UAVs. By training in a complex unknown environment constructed based on the parameters of a real UAV, the proposed ACER improves the convergence speed by 24.66\% and the convergence result by 5.59\% compared to the state-of-the-art twin delayed deep deterministic policy gradient (TD3) algorithm. The testing experiments carried out in environments with different complexities demonstrate the strong robustness and generalization ability of the ACER agent.