 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring human-SAV interaction using large language models: The impact of psychological ownership and anthropomorphism on user experience
Apr 23, 2025



There has been extensive prior work exploring how psychological factors such as anthropomorphism affect the adoption of shared autonomous vehicles (SAVs). However, limited research has been conducted on how prompt strategies in large language model (LLM)-powered SAV User Interfaces (UIs) affect users' perceptions, experiences, and intentions to adopt such technology. In this work, we investigate how conversational UIs powered by LLMs drive these psychological factors and psychological ownership, the sense of possession a user may come to feel towards an entity or object they may not legally own. We designed four SAV UIs with varying levels of anthropomorphic characteristics and psychological ownership triggers. Quantitative measures of psychological ownership, anthropomorphism, quality of service, disclosure tendency, sentiment of SAV responses, and overall acceptance were collected after participants interacted with each SAV. Qualitative feedback was also gathered regarding the experience of psychological ownership during the interactions. The results indicate that an SAV conversational UI designed to be more anthropomorphic and to induce psychological ownership improved users' perceptions of the SAV's human-like qualities and improved the sentiment of responses compared to a control condition. These findings provide practical guidance for designing LLM-based conversational UIs that enhance user experience and adoption of SAVs.
Predictability and Fairness in Social Sensing
Jul 31, 2020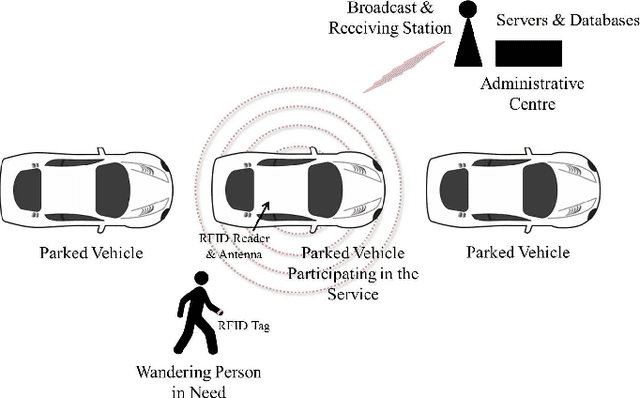
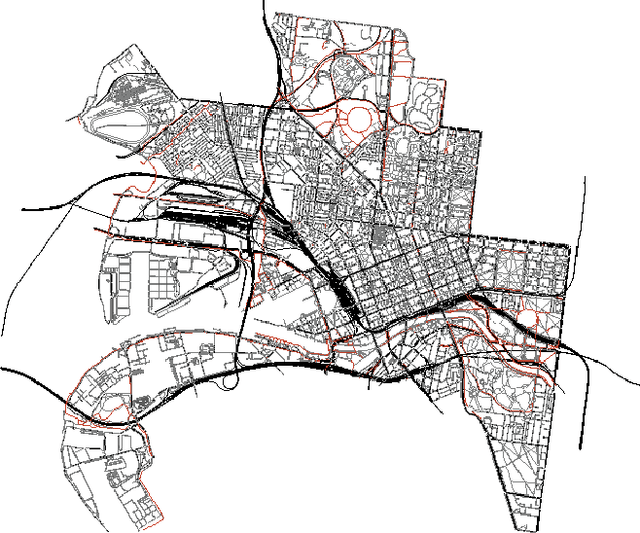
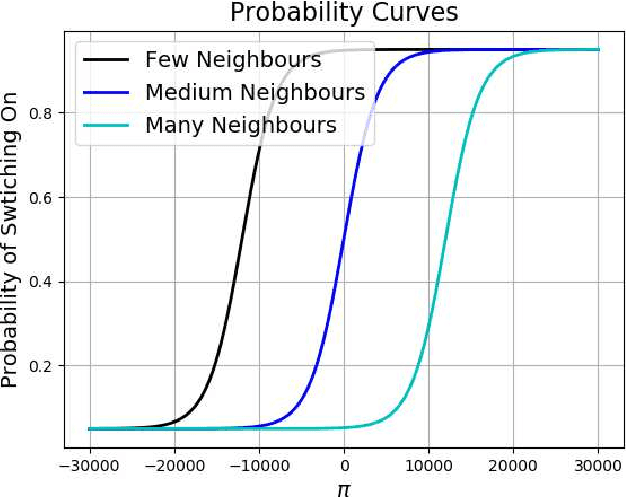
In many applications, one may benefit from the collaborative collection of data for sensing a physical phenomenon, which is known as social sensing. We show how to make social sensing (1) predictable, in the sense of guaranteeing that the number of queries per participant will be independent of the initial state, in expectation, even when the population of participants varies over time, and (2) fair, in the sense of guaranteeing that the number of queries per participant will be equalised among the participants, in expectation, even when the population of participants varies over time. In a use case, we consider a large, high-density network of participating parked vehicles. When awoken by an administrative centre, this network proceeds to search for moving, missing entities of interest using RFID-based techniques. We regulate the number and geographical distribution of the parked vehicles that are "Switched On" and thus actively searching for the moving entity of interest. In doing so, we seek to conserve vehicular energy consumption while, at the same time, maintaining good geographical coverage of the city such that the moving entity of interest is likely to be located within an acceptable time frame. Which vehicle participants are "Switched On" at any point in time is determined periodically through the use of stochastic techniques. This is illustrated on the example of a missing Alzheimer's patient in Melbourne, Australia.
An Assessment on the Use of Stationary Vehicles as a Support to Cooperative Positioning
Feb 26, 2015
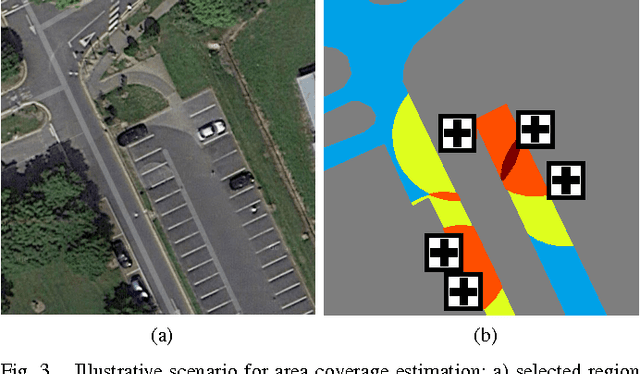
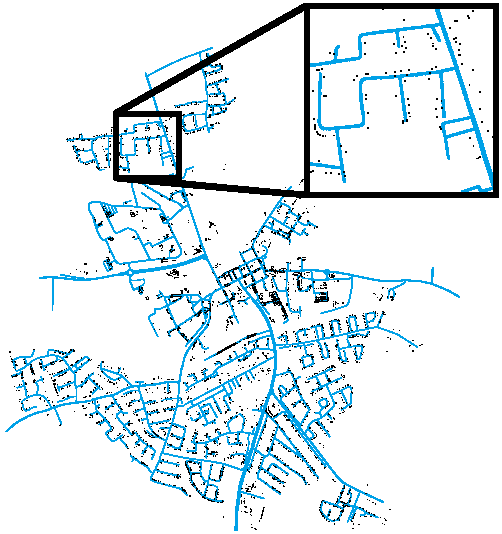
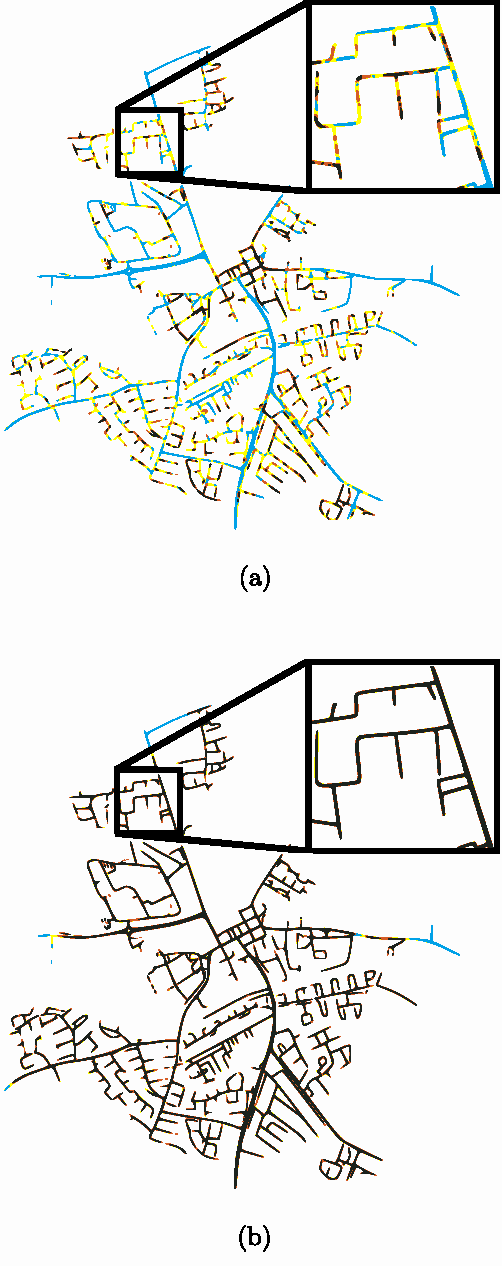
In this paper, we consider the use of stationary vehicles as tools to enhance the localisation capabilities of moving vehicles in a VANET. We examine the idea in terms of its potential benefits, technical requirements, algorithmic design and experimental evaluation. Simulation results are given to illustrate the efficacy of the technique.