 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlow Matching Policy with Entropy Regularization
Mar 19, 2026Diffusion-based policies have gained significant popularity in Reinforcement Learning (RL) due to their ability to represent complex, non-Gaussian distributions. Stochastic Differential Equation (SDE)-based diffusion policies often rely on indirect entropy control due to the intractability of the exact entropy, while also suffering from computationally prohibitive policy gradients through the iterative denoising chain. To overcome these issues, we propose Flow Matching Policy with Entropy Regularization (FMER), an Ordinary Differential Equation (ODE)-based online RL framework. FMER parameterizes the policy via flow matching and samples actions along a straight probability path, motivated by optimal transport. FMER leverages the model's generative nature to construct an advantage-weighted target velocity field from a candidate set, steering policy updates toward high-value regions. By deriving a tractable entropy objective, FMER enables principled maximum-entropy optimization for enhanced exploration. Experiments on sparse multi-goal FrankaKitchen benchmarks demonstrate that FMER outperforms state-of-the-art methods, while remaining competitive on standard MuJoco benchmarks. Moreover, FMER reduces training time by 7x compared to heavy diffusion baselines (QVPO) and 10-15% relative to efficient variants.
Framework for Network-Constrained Target Tracking
Mar 02, 2022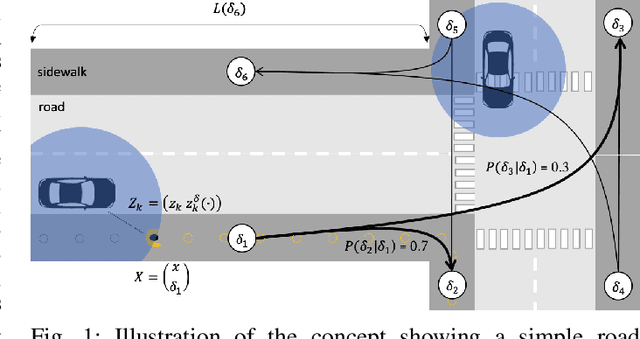
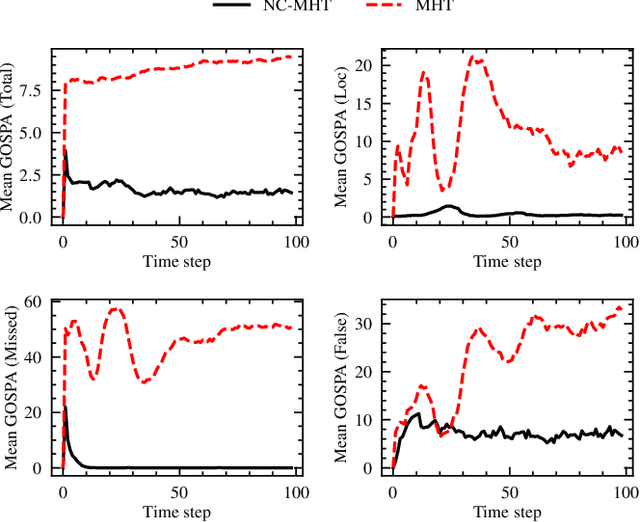
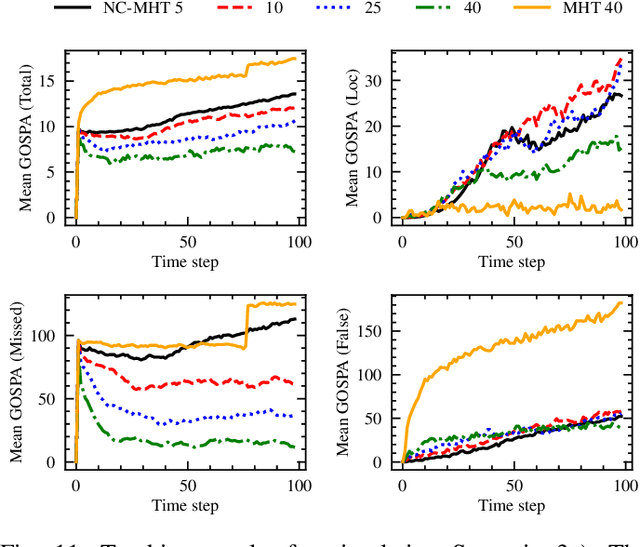
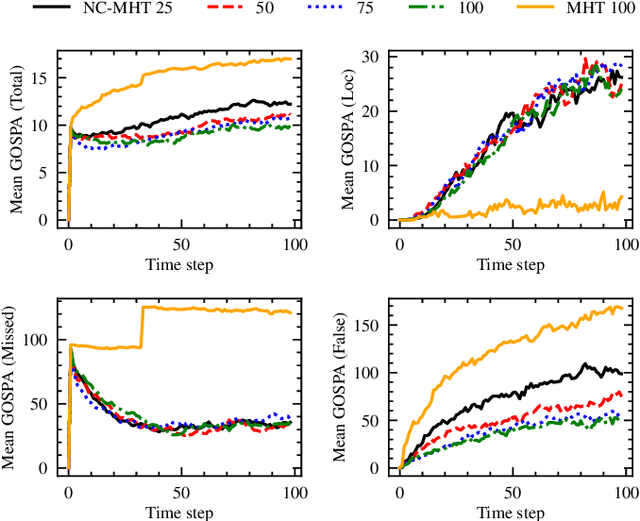
The increase in perception capabilities of connected mobile sensor platforms (e.g., self-driving vehicles, drones, and robots) leads to an extensive surge of sensed features at various temporal and spatial scales. Beyond their traditional use for safe operation, available observations could enable to see how and where people move on sidewalks and cycle paths, to eventually obtain a complete microscopic and macroscopic picture of the traffic flows in a larger area. This paper proposes a new method for advanced traffic applications, tracking an unknown and varying number of moving targets (e.g., pedestrians or cyclists) constrained by a road network, using mobile (e.g., vehicles) spatially distributed sensor platforms. The key contribution in this paper is to introduce the concept of network bound targets into the multi-target tracking problem, and hence to derive a network-constrained multi-hypotheses tracker (NC-MHT) to fully utilize the available road information. This is done by introducing a target representation, comprising a traditional target tracking representation and a discrete component placing the target on a given segment in the network. A simulation study shows that the method performs well in comparison to the standard MHT filter in free space. Results particularly highlight network-constraint effects for more efficient target predictions over extended periods of time, and in the simplification of the measurement association process, as compared to not utilizing a network structure. This theoretical work also directs attention to latent privacy concerns for potential applications.