 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Development of Miniature long distance multi-moving robots for 3D Smart Sensing for underground Pipe Inspection
Aug 22, 2022

Designing an in-pipe climbing robot that manipulates sharp gears to study complex line relationships. Traditional rolling/happening pipe climbing robots tend to slide when exploring pipe curves. The proposed gearbox connects to the farthest ground plane of a standard dual output gearbox. Instrumentation helps achieve a very well-defined deceleration sequence in which the robot slides and pulls as it moves forward. This instrument takes into account the forces exerted on each track within the line relationship and intentionally modifies the robot's track speed, unlocking the key to fine-tuning. This makes the 3 output transmissions take a lot of time. Deflection of the robot on a pipe network with various bearings and non-slip pipe bends demonstrates the integrity of the proposed structure.
Deployment of long distance multi-moving robots for underground pipe inspection
Aug 13, 2022
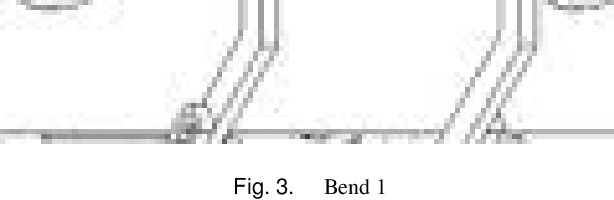
Blueprint of an in-pipe climbing robot that works with sharp transmissions to study complex line relationships. Standard wheeled/happening pipe climbing robots tend to slide when exploring pipe turns. Instruments help achieve a very distinct delay sequence in which the robot slides and drags as it progresses. The proposed transmission joins the farthest ground plane of the standard two-output transmission. This opens up a substantial time for 3 output transmissions. This instrument takes into account the force exerted on each track within the line relation to specifically alter the robot's track speed, unlocking the key to fine control. Deflection of the robot across pipe networks with different bearings and non-slip pipe bends demonstrate the integrity of the proposed structure.