 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Initialization and Extrinsic Spatial-Temporal Calibration for Monocular Visual-Inertial Odometry
Apr 12, 2020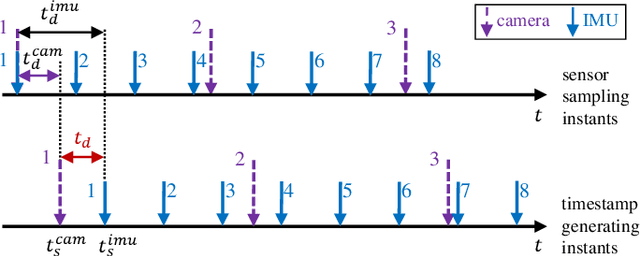
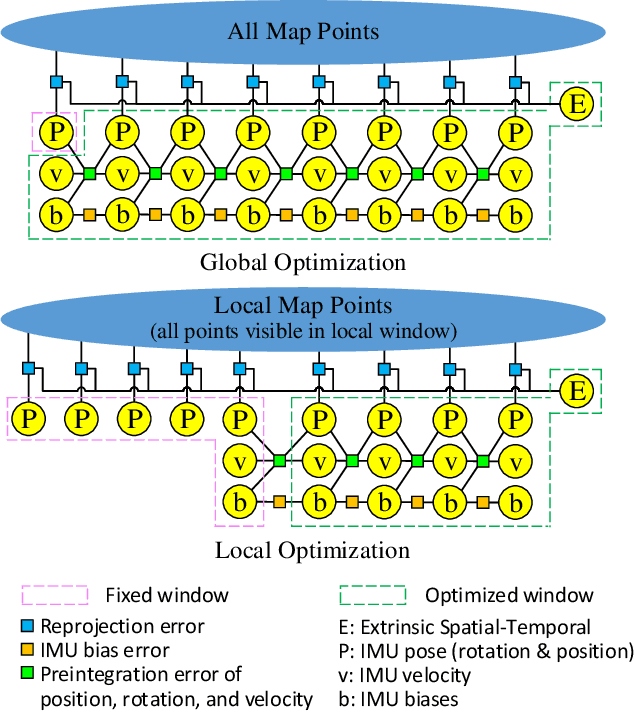
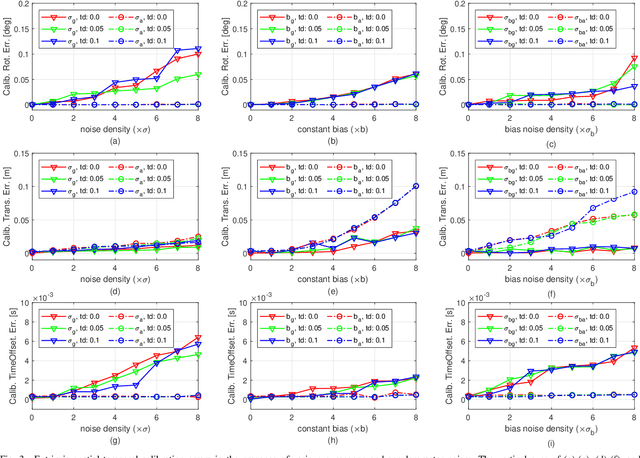
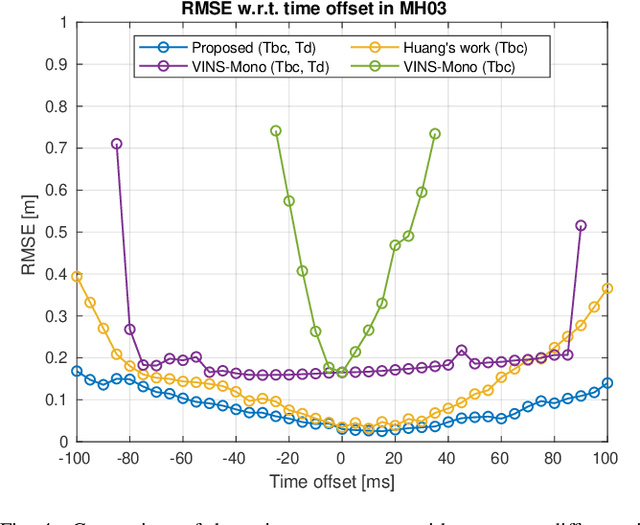
This paper presents an online initialization method for bootstrapping the optimization-based monocular visual-inertial odometry (VIO). The method can online calibrate the relative transformation (spatial) and time offsets (temporal) among camera and IMU, as well as estimate the initial values of metric scale, velocity, gravity, gyroscope bias, and accelerometer bias during the initialization stage. To compensate for the impact of time offset, our method includes two short-term motion interpolation algorithms for the camera and IMU pose estimation. Besides, it includes a three-step process to incrementally estimate the parameters from coarse to fine. First, the extrinsic rotation, gyroscope bias, and time offset are estimated by minimizing the rotation difference between the camera and IMU. Second, the metric scale, gravity, and extrinsic translation are approximately estimated by using the compensated camera poses and ignoring the accelerometer bias. Third, these values are refined by taking into account the accelerometer bias and the gravitational magnitude. For further optimizing the system states, a nonlinear optimization algorithm, which considers the time offset, is introduced for global and local optimization. Experimental results on public datasets show that the initial values and the extrinsic parameters, as well as the sensor poses, can be accurately estimated by the proposed method.
A PCB Dataset for Defects Detection and Classification
Jan 24, 2019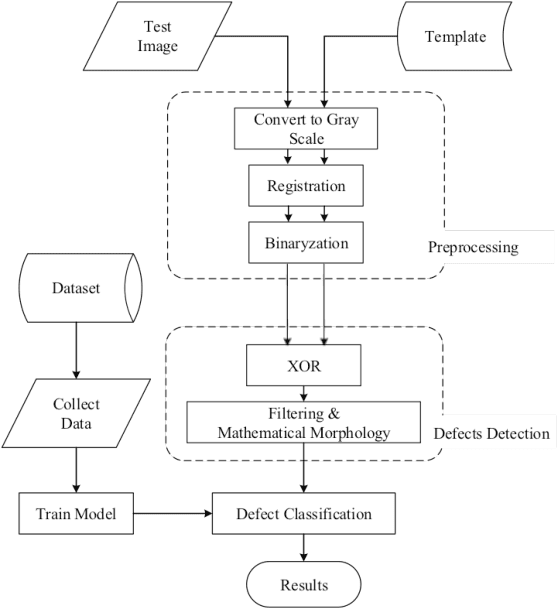
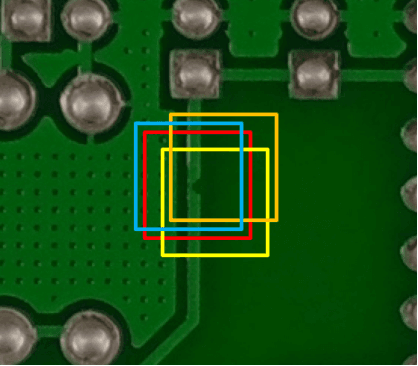
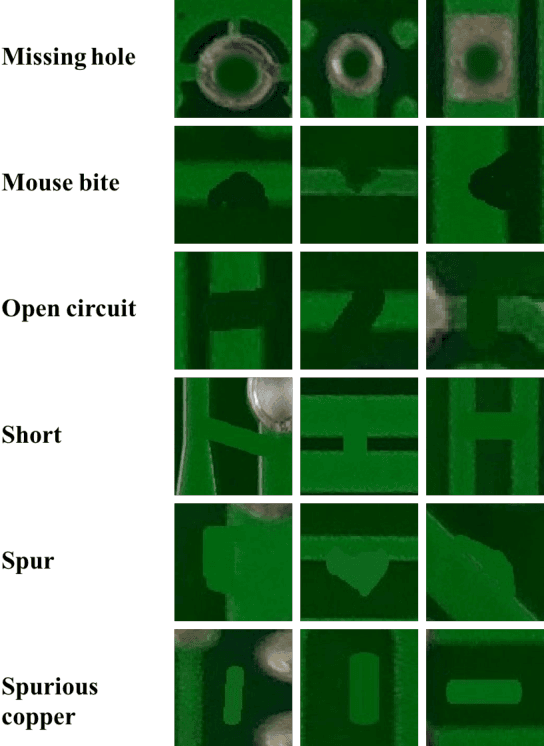
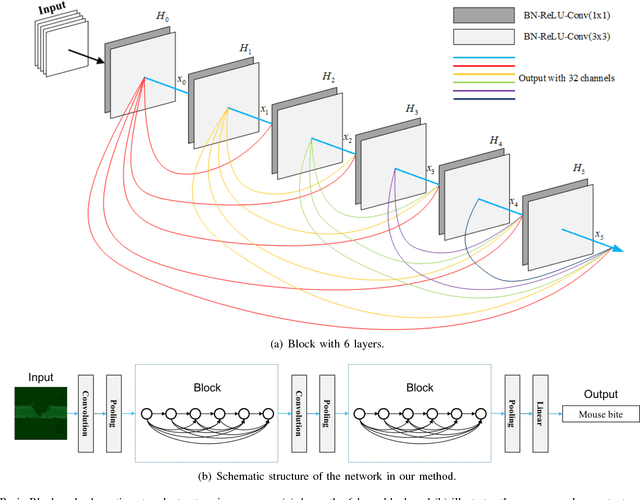
To coupe with the difficulties in the process of inspection and classification of defects in Printed Circuit Board (PCB), other researchers have proposed many methods. However, few of them published their dataset before, which hindered the introduction and comparison of new methods. In this paper, we published a synthesized PCB dataset containing 1386 images with 6 kinds of defects for the use of detection, classification and registration tasks. Besides, we proposed a reference based method to inspect and trained an end-to-end convolutional neural network to classify the defects. Unlike conventional approaches that require pixel-by-pixel processing, our method firstly locate the defects and then classify them by neural networks, which shows superior performance on our dataset.