 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Sensing and Earthmoving Vehicle for Lunar Landing Pad Construction
Dec 31, 2019

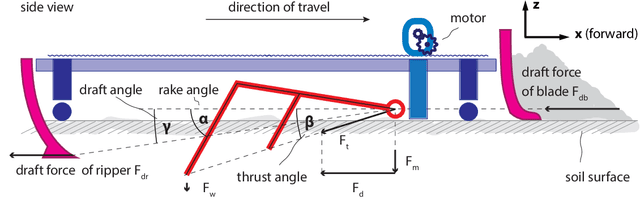

Reducing the forces necessary to construct projects like landing pads and blast walls is possibly one of the major drivers in reducing the costs of establishing lunar settlements. The interlock drive system generates traction by penetrating articulated spikes into the ground and by using the natural strength of the ground for traction. The spikes develop a high pull to weight ratio and promise good mobility in soft, rocky and steep terrain, energy-efficient operation, and their design is relatively simple. By penetrating the ground at regular intervals, the spikes also enable the in-situ measurement of a variety of ground properties, including penetration resistance, temperature, and pH. Here we present a concept for a light lunar bulldozer with interlocking spikes that uses a blade and a ripper to loosen and move soil over short distances, that maps ground properties in situ and that uses this information to construct landing pads and blast walls, and to otherwise interact with the ground in a targeted and efficient manner. Trials on Mediterranean soil have shown that this concept promises to satisfy many of the basic requirements expected of a lunar excavator. To better predict performance in a lunar or Martian environment, experiments on relevant soil simulants are needed.
Design, modelling and control of a novel agricultural robot with interlock drive system
Dec 01, 2019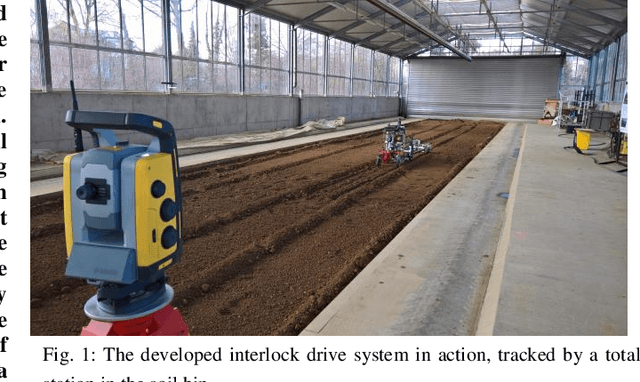
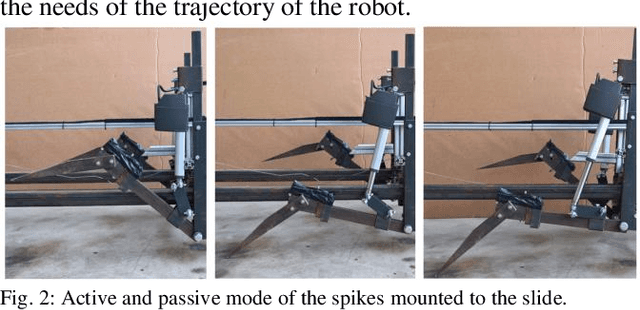
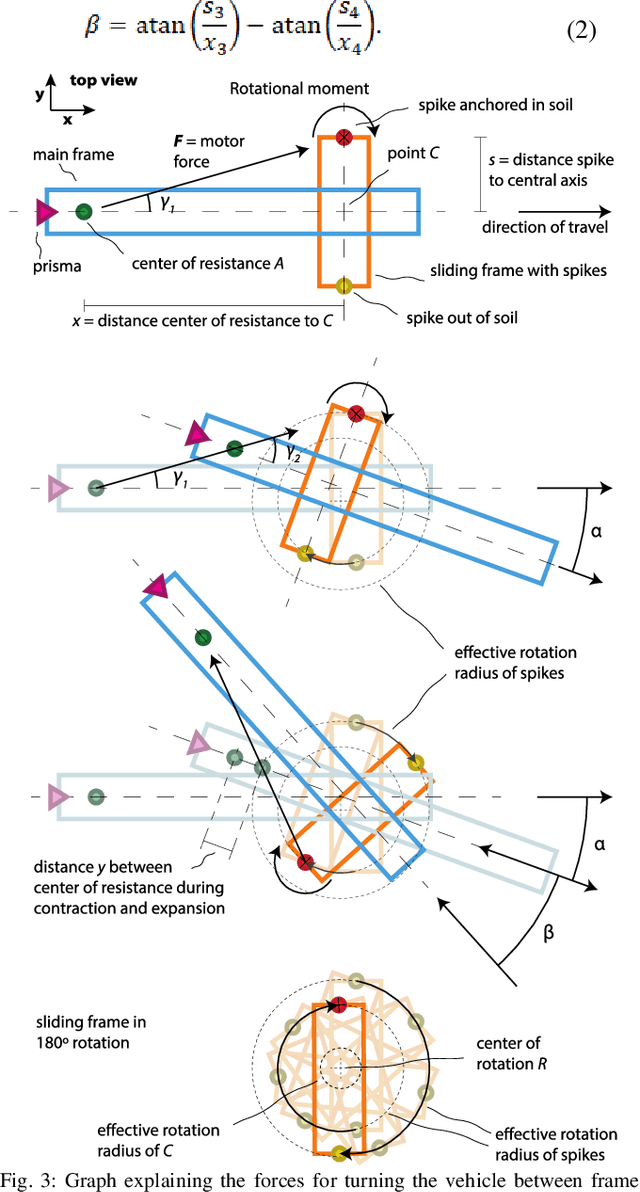
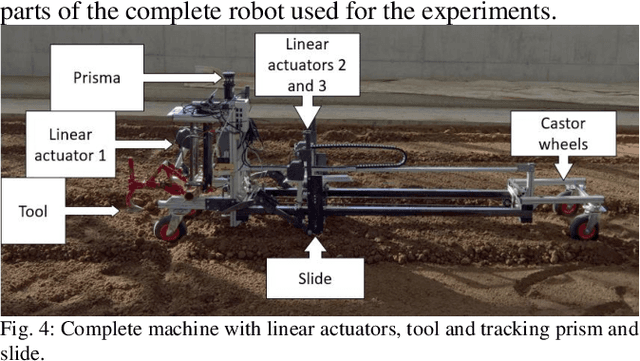
A current problem in the design of small and lightweight autonomous agricultural robots is how to create sufficient traction on soil to pull an agricultural implement or load. One promising solution is offered by the interlock drive system, which penetrates spikes into the soil to create traction. The combination of soil penetrating spikes and a push-pull design offers new possibilities for vehicle control. By controlling the interlocking of the spikes and pushing and pulling them against the main frame, the vehicle can perform tight maneuvers. To validate this idea, we designed a robot, capable of creating high traction and performing headland turns. The navigation of the new robot system is performed by actively pushing the spikes, mounted on a slide into the soil, while the main frame is pushed back and pulled forward. The vehicle of 2-meter length was able to turn on the spot, and could follow a straight line, just using the spikes and the push-pull mechanism. The trajectory and the performed measurements suggest, that a vehicle which uses only spikes for traction and steering is fully capable of performing autonomous tasks in agriculture fields.
A Short Introduction to Model Selection, Kolmogorov Complexity and Minimum Description Length (MDL)
May 14, 2010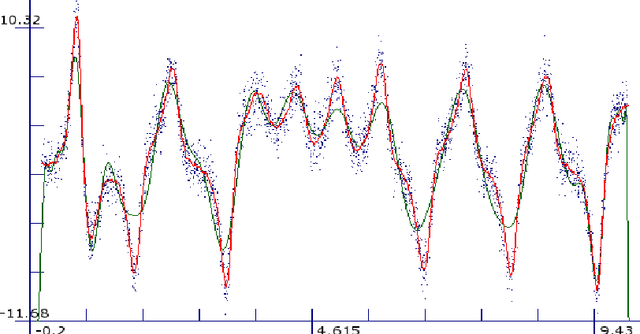
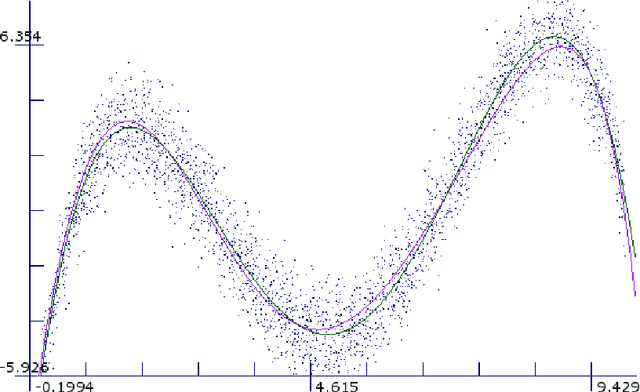
The concept of overfitting in model selection is explained and demonstrated with an example. After providing some background information on information theory and Kolmogorov complexity, we provide a short explanation of Minimum Description Length and error minimization. We conclude with a discussion of the typical features of overfitting in model selection.