 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVolume and leaf area calculation of cabbage with a neural network-based instance segmentation
Apr 12, 2021
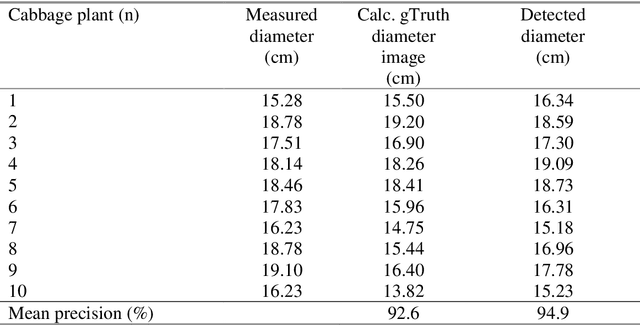
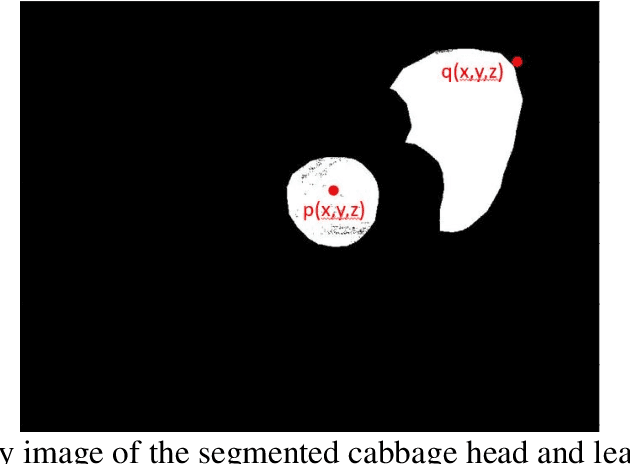
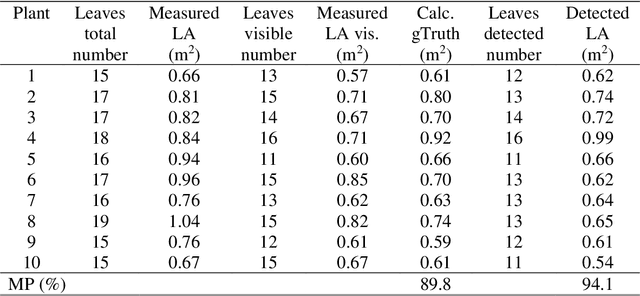
Fruit size and leaf area are important indicators for plant health and are of interest for plant nutrient management, plant protection and harvest. In this research, an image-based method for measuring the fruit volume as well as the leaf area for cabbage is presented. For this purpose, a mask region-based convolutional neural network (Mask R-CNN) was trained to segment the cabbage fruit from the leaves and assign it to the corresponding plant. The results indicated that even with a single camera, the developed method can provide a calculation accuracy of fruit size of 92.6% and an accuracy of leaf area of 89.8% on individual plant level.
Approach for modeling single branches of meadow orchard trees with 3D point clouds
Apr 12, 2021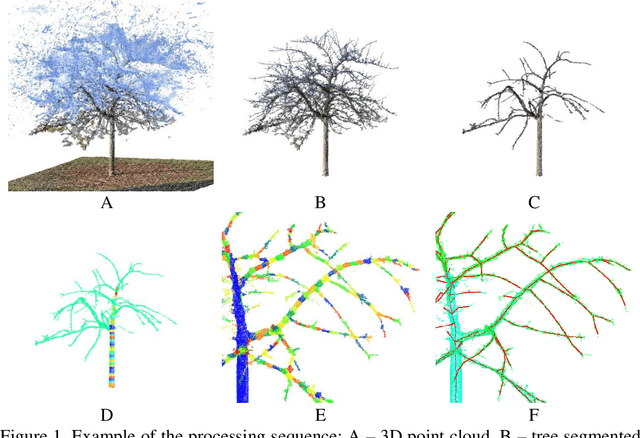
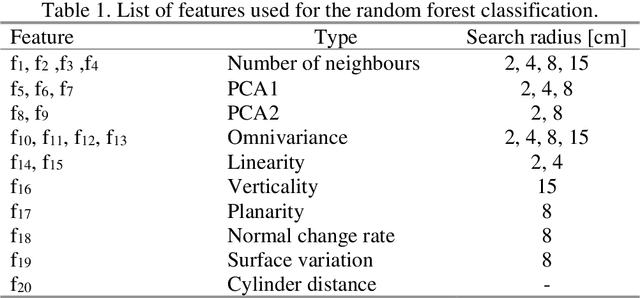
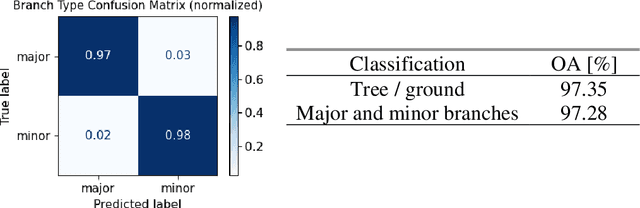
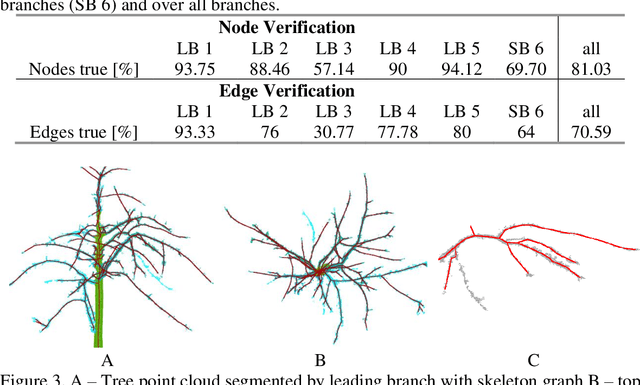
The cultivation of orchard meadows provides an ecological benefit for biodiversity, which is significantly higher than in intensively cultivated orchards. The goal of this research is to create a tree model to automatically determine possible pruning points for stand-alone trees within meadows. The algorithm which is presented here is capable of building a skeleton model based on a pre-segmented photogrammetric 3D point cloud. Good results were achieved in assigning the points to their leading branches and building a virtual tree model, reaching an overall accuracy of 95.19 %. This model provided the necessary information about the geometry of the tree for automated pruning.
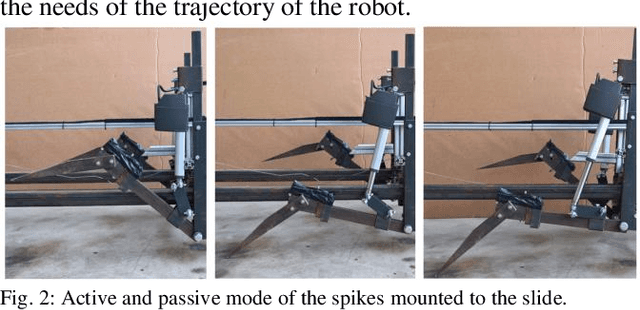
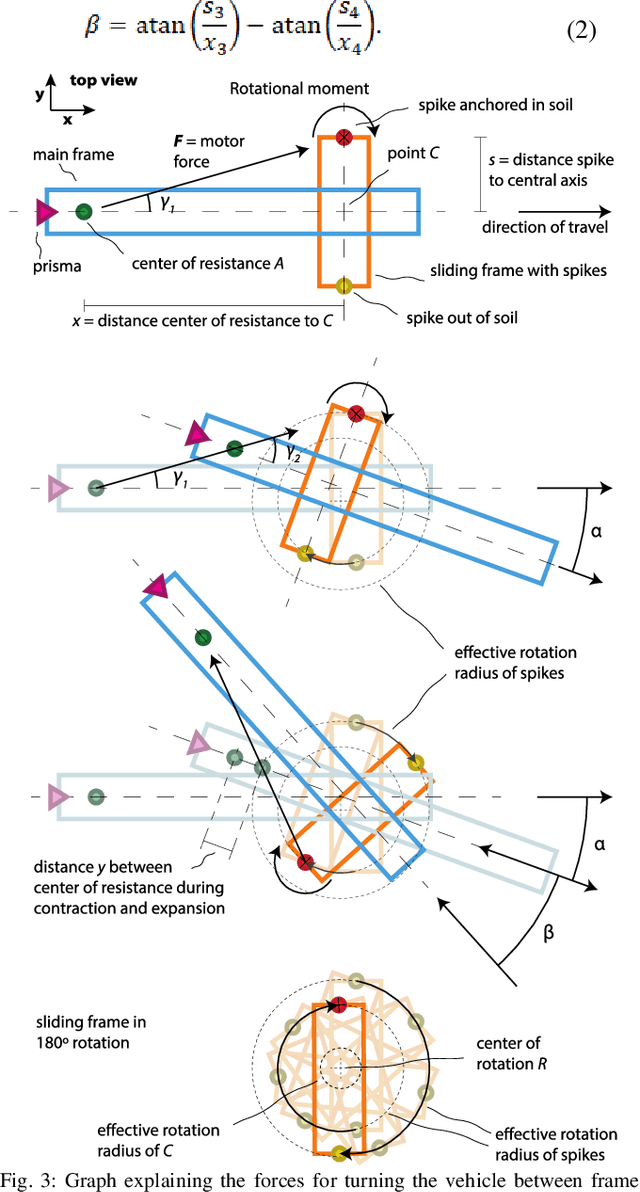
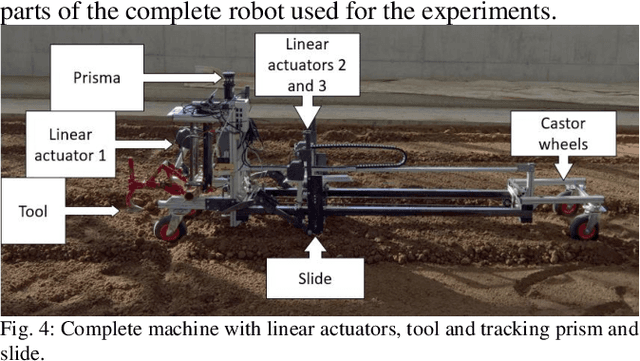
Design, modelling and control of a novel agricultural robot with interlock drive system
Dec 01, 2019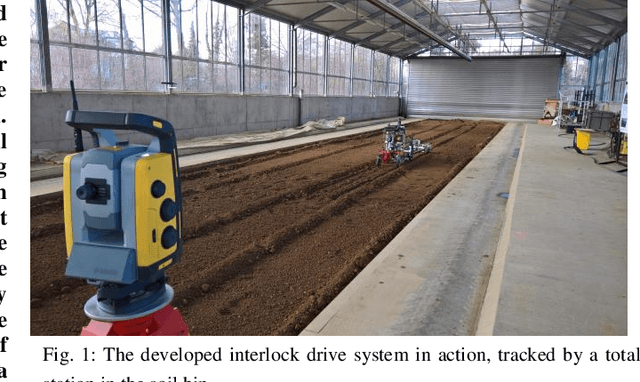
A current problem in the design of small and lightweight autonomous agricultural robots is how to create sufficient traction on soil to pull an agricultural implement or load. One promising solution is offered by the interlock drive system, which penetrates spikes into the soil to create traction. The combination of soil penetrating spikes and a push-pull design offers new possibilities for vehicle control. By controlling the interlocking of the spikes and pushing and pulling them against the main frame, the vehicle can perform tight maneuvers. To validate this idea, we designed a robot, capable of creating high traction and performing headland turns. The navigation of the new robot system is performed by actively pushing the spikes, mounted on a slide into the soil, while the main frame is pushed back and pulled forward. The vehicle of 2-meter length was able to turn on the spot, and could follow a straight line, just using the spikes and the push-pull mechanism. The trajectory and the performed measurements suggest, that a vehicle which uses only spikes for traction and steering is fully capable of performing autonomous tasks in agriculture fields.