 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSidewalkBench: Benchmarking Visual Navigation on Urban Sidewalks
Jun 15, 2026Urban sidewalk navigation presents significant challenges due to complex structural layouts, dynamic pedestrian behaviors, and long distances. While recent visual navigation models offer a promising solution, the lack of a unified benchmark hinders quantitative and reproducible evaluation. To bridge this gap, we propose SidewalkBench, a comprehensive benchmark designed for visual navigation on urban sidewalks. Built upon NVIDIA Isaac Sim, SidewalkBench brings GPU-accelerated simulation of diverse, high-fidelity sidewalk environments, including both procedurally generated and real-world scanned scenes. We further populate the scenes with rich, reactive event-based pedestrian behaviors and flexible, efficient animation, enabling standardized model evaluation under realistic real-world settings. We conduct a comprehensive evaluation of 9 visual navigation models on 330 unit-test scenarios, 800 pedestrian-reactive scenarios, and 105 long-horizon scenarios. Our findings highlight that pedestrian interaction and long-horizon robustness remain critical bottlenecks for existing models, and scaling up sidewalk training with synthetic data emerges as a promising solution.
DePT3R: Joint Dense Point Tracking and 3D Reconstruction of Dynamic Scenes in a Single Forward Pass
Dec 15, 2025



Current methods for dense 3D point tracking in dynamic scenes typically rely on pairwise processing, require known camera poses, or assume a temporal ordering to input frames, constraining their flexibility and applicability. Additionally, recent advances have successfully enabled efficient 3D reconstruction from large-scale, unposed image collections, underscoring opportunities for unified approaches to dynamic scene understanding. Motivated by this, we propose DePT3R, a novel framework that simultaneously performs dense point tracking and 3D reconstruction of dynamic scenes from multiple images in a single forward pass. This multi-task learning is achieved by extracting deep spatio-temporal features with a powerful backbone and regressing pixel-wise maps with dense prediction heads. Crucially, DePT3R operates without requiring camera poses, substantially enhancing its adaptability and efficiency-especially important in dynamic environments with rapid changes. We validate DePT3R on several challenging benchmarks involving dynamic scenes, demonstrating strong performance and significant improvements in memory efficiency over existing state-of-the-art methods. Data and codes are available via the open repository: https://github.com/StructuresComp/DePT3R
Reconstruction Using the Invisible: Intuition from NIR and Metadata for Enhanced 3D Gaussian Splatting
Aug 20, 2025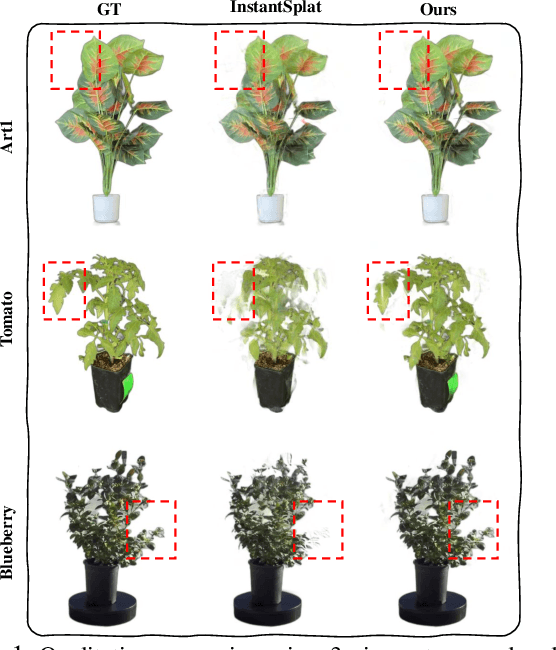
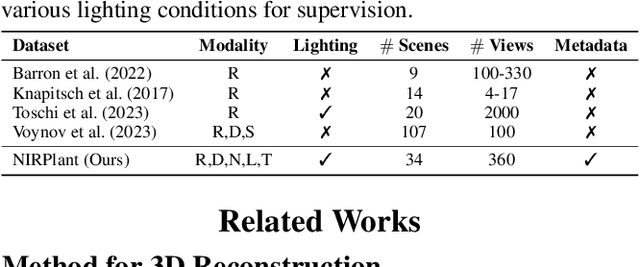
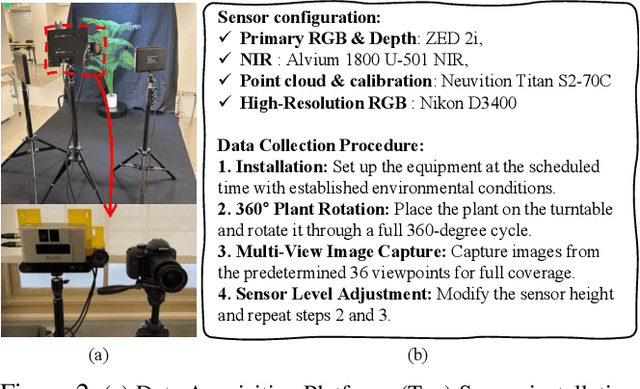
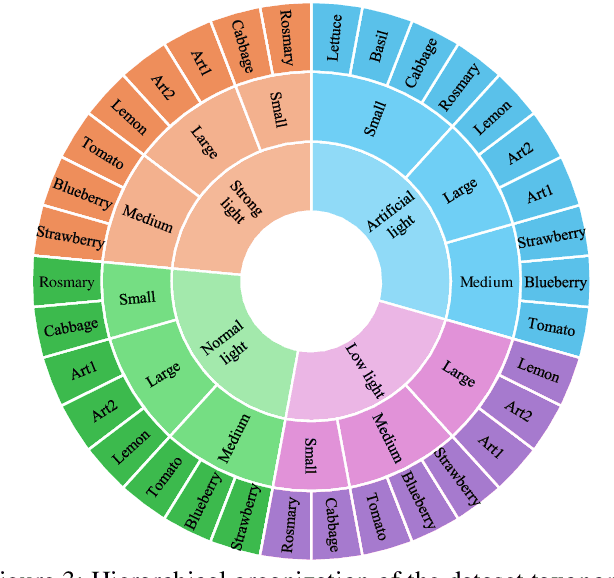
While 3D Gaussian Splatting (3DGS) has rapidly advanced, its application in agriculture remains underexplored. Agricultural scenes present unique challenges for 3D reconstruction methods, particularly due to uneven illumination, occlusions, and a limited field of view. To address these limitations, we introduce \textbf{NIRPlant}, a novel multimodal dataset encompassing Near-Infrared (NIR) imagery, RGB imagery, textual metadata, Depth, and LiDAR data collected under varied indoor and outdoor lighting conditions. By integrating NIR data, our approach enhances robustness and provides crucial botanical insights that extend beyond the visible spectrum. Additionally, we leverage text-based metadata derived from vegetation indices, such as NDVI, NDWI, and the chlorophyll index, which significantly enriches the contextual understanding of complex agricultural environments. To fully exploit these modalities, we propose \textbf{NIRSplat}, an effective multimodal Gaussian splatting architecture employing a cross-attention mechanism combined with 3D point-based positional encoding, providing robust geometric priors. Comprehensive experiments demonstrate that \textbf{NIRSplat} outperforms existing landmark methods, including 3DGS, CoR-GS, and InstantSplat, highlighting its effectiveness in challenging agricultural scenarios. The code and dataset are publicly available at: https://github.com/StructuresComp/3D-Reconstruction-NIR