 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Learning Effectiveness For Object Detection and Classification in Cluttered Backgrounds
Feb 27, 2020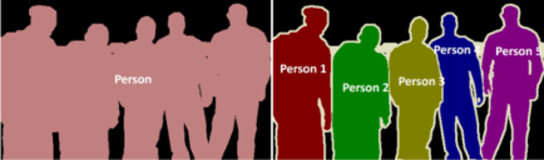
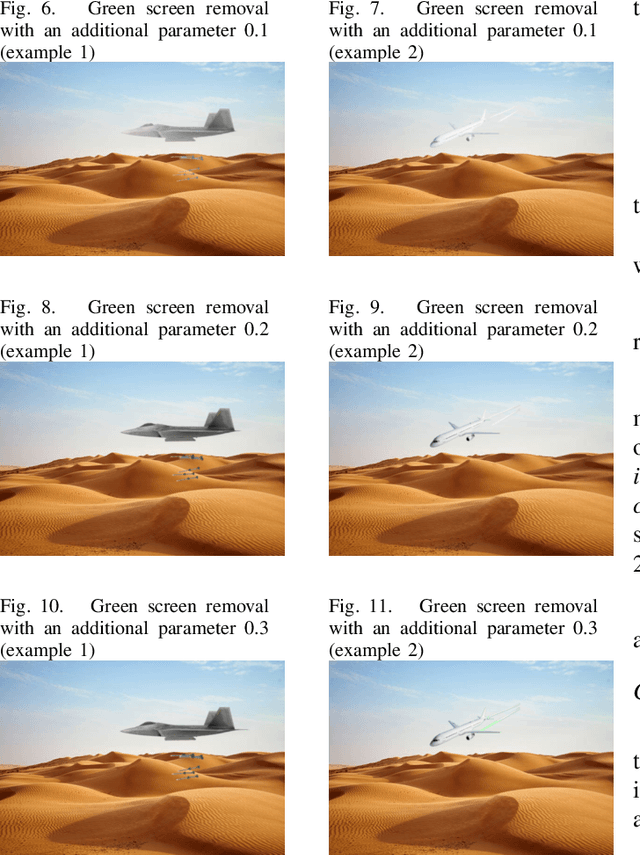
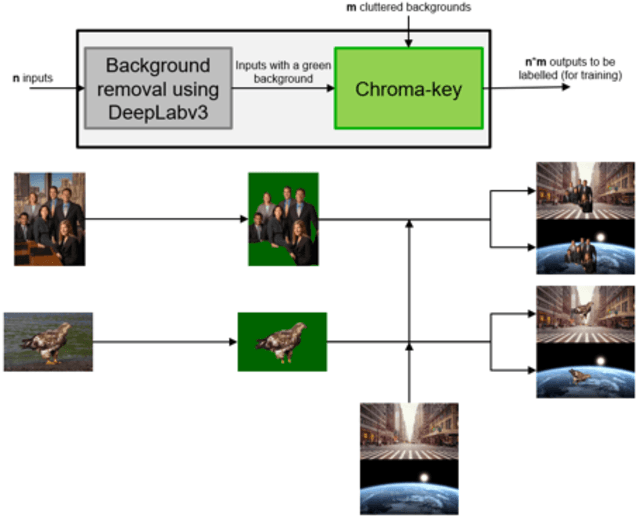
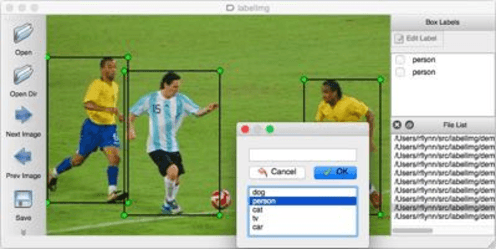
Usually, Neural Networks models are trained with a large dataset of images in homogeneous backgrounds. The issue is that the performance of the network models trained could be significantly degraded in a complex and heterogeneous environment. To mitigate the issue, this paper develops a framework that permits to autonomously generate a training dataset in heterogeneous cluttered backgrounds. It is clear that the learning effectiveness of the proposed framework should be improved in complex and heterogeneous environments, compared with the ones with the typical dataset. In our framework, a state-of-the-art image segmentation technique called DeepLab is used to extract objects of interest from a picture and Chroma-key technique is then used to merge the extracted objects of interest into specific heterogeneous backgrounds. The performance of the proposed framework is investigated through empirical tests and compared with that of the model trained with the COCO dataset. The results show that the proposed framework outperforms the model compared. This implies that the learning effectiveness of the framework developed is superior to the models with the typical dataset.
Target Detection, Tracking and Avoidance System for Low-cost UAVs using AI-Based Approaches
Feb 27, 2020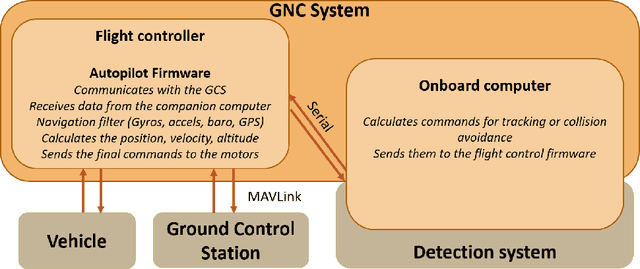
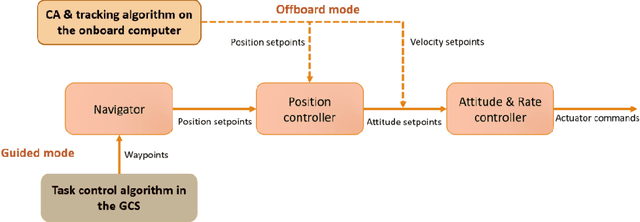
An onboard target detection, tracking and avoidance system has been developed in this paper, for low-cost UAV flight controllers using AI-Based approaches. The aim of the proposed system is that an ally UAV can either avoid or track an unexpected enemy UAV with a net to protect itself. In this point of view, a simple and robust target detection, tracking and avoidance system is designed. Two open-source tools were used for the aim: a state-of-the-art object detection technique called SSD and an API for MAVLink compatible systems called MAVSDK. The MAVSDK performs velocity control when a UAV is detected so that the manoeuvre is done simply and efficiently. The proposed system was verified with Software in the loop (SITL) and Hardware in the loop (HITL) simulators. The simplicity of this algorithm makes it innovative, and therefore it should be used in future applications needing robust performances with low-cost hardware such as delivery drone applications.