 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeK-Dense Analyst: Towards Fully Automated Scientific Analysis
Aug 09, 2025The complexity of modern bioinformatics analysis has created a critical gap between data generation and developing scientific insights. While large language models (LLMs) have shown promise in scientific reasoning, they remain fundamentally limited when dealing with real-world analytical workflows that demand iterative computation, tool integration and rigorous validation. We introduce K-Dense Analyst, a hierarchical multi-agent system that achieves autonomous bioinformatics analysis through a dual-loop architecture. K-Dense Analyst, part of the broader K-Dense platform, couples planning with validated execution using specialized agents to decompose complex objectives into executable, verifiable tasks within secure computational environments. On BixBench, a comprehensive benchmark for open-ended biological analysis, K-Dense Analyst achieves 29.2% accuracy, surpassing the best-performing language model (GPT-5) by 6.3 percentage points, representing nearly 27% improvement over what is widely considered the most powerful LLM available. Remarkably, K-Dense Analyst achieves this performance using Gemini 2.5 Pro, which attains only 18.3% accuracy when used directly, demonstrating that our architectural innovations unlock capabilities far beyond the underlying model's baseline performance. Our insights demonstrate that autonomous scientific reasoning requires more than enhanced language models, it demands purpose-built systems that can bridge the gap between high-level scientific objectives and low-level computational execution. These results represent a significant advance toward fully autonomous computational biologists capable of accelerating discovery across the life sciences.
Object-based synthesis of scraping and rolling sounds based on non-linear physical constraints
Dec 16, 2021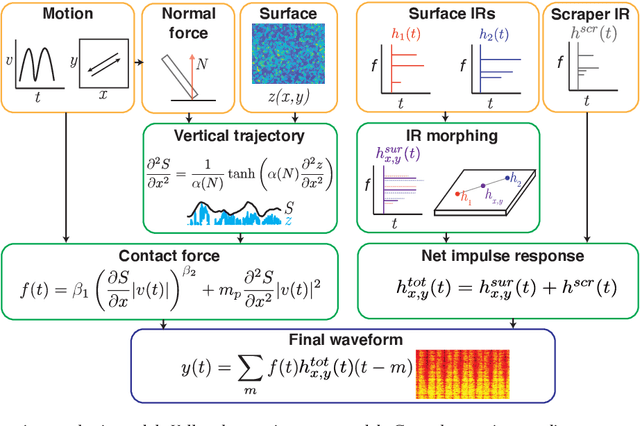
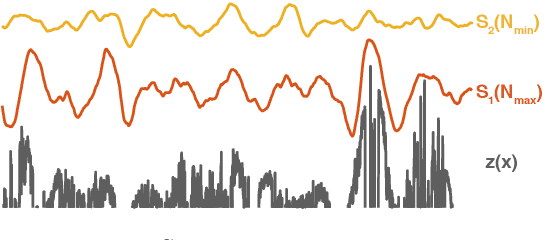

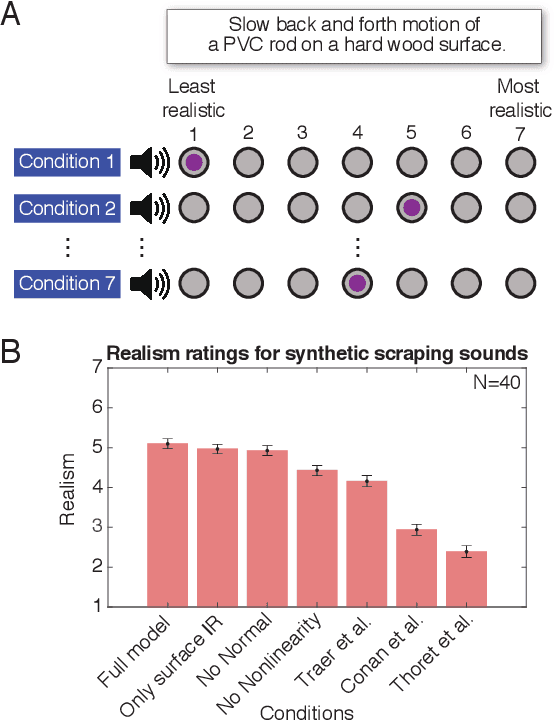
Sustained contact interactions like scraping and rolling produce a wide variety of sounds. Previous studies have explored ways to synthesize these sounds efficiently and intuitively but could not fully mimic the rich structure of real instances of these sounds. We present a novel source-filter model for realistic synthesis of scraping and rolling sounds with physically and perceptually relevant controllable parameters constrained by principles of mechanics. Key features of our model include non-linearities to constrain the contact force, naturalistic normal force variation for different motions, and a method for morphing impulse responses within a material to achieve location-dependence. Perceptual experiments show that the presented model is able to synthesize realistic scraping and rolling sounds while conveying physical information similar to that in recorded sounds.