 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI Enabling Technologies: A Survey
May 08, 2019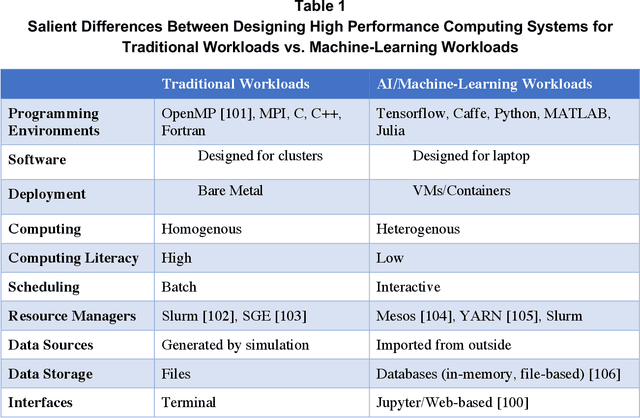
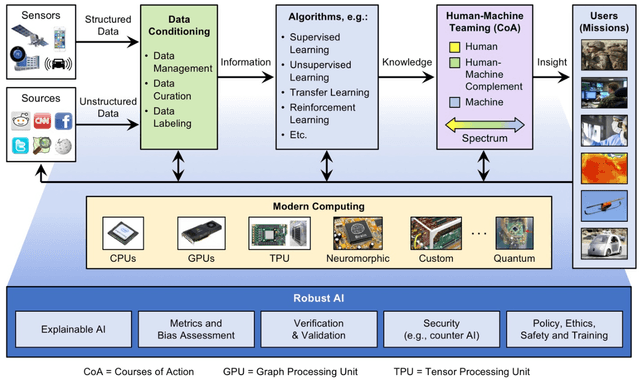

Artificial Intelligence (AI) has the opportunity to revolutionize the way the United States Department of Defense (DoD) and Intelligence Community (IC) address the challenges of evolving threats, data deluge, and rapid courses of action. Developing an end-to-end artificial intelligence system involves parallel development of different pieces that must work together in order to provide capabilities that can be used by decision makers, warfighters and analysts. These pieces include data collection, data conditioning, algorithms, computing, robust artificial intelligence, and human-machine teaming. While much of the popular press today surrounds advances in algorithms and computing, most modern AI systems leverage advances across numerous different fields. Further, while certain components may not be as visible to end-users as others, our experience has shown that each of these interrelated components play a major role in the success or failure of an AI system. This article is meant to highlight many of these technologies that are involved in an end-to-end AI system. The goal of this article is to provide readers with an overview of terminology, technical details and recent highlights from academia, industry and government. Where possible, we indicate relevant resources that can be used for further reading and understanding.
Sparse Deep Neural Network Exact Solutions
Jul 06, 2018
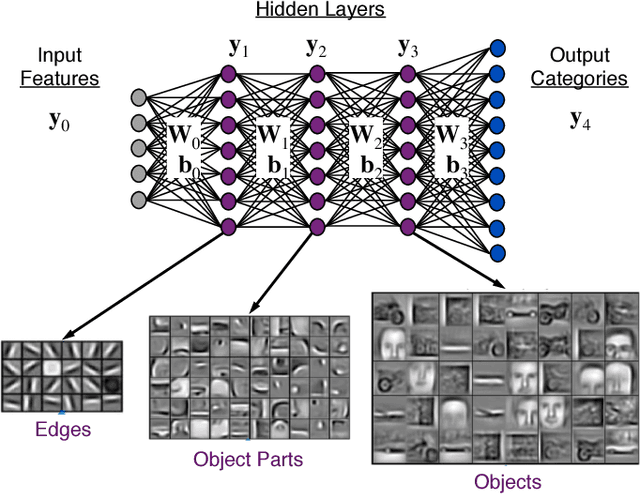
Deep neural networks (DNNs) have emerged as key enablers of machine learning. Applying larger DNNs to more diverse applications is an important challenge. The computations performed during DNN training and inference are dominated by operations on the weight matrices describing the DNN. As DNNs incorporate more layers and more neurons per layers, these weight matrices may be required to be sparse because of memory limitations. Sparse DNNs are one possible approach, but the underlying theory is in the early stages of development and presents a number of challenges, including determining the accuracy of inference and selecting nonzero weights for training. Associative array algebra has been developed by the big data community to combine and extend database, matrix, and graph/network concepts for use in large, sparse data problems. Applying this mathematics to DNNs simplifies the formulation of DNN mathematics and reveals that DNNs are linear over oscillating semirings. This work uses associative array DNNs to construct exact solutions and corresponding perturbation models to the rectified linear unit (ReLU) DNN equations that can be used to construct test vectors for sparse DNN implementations over various precisions. These solutions can be used for DNN verification, theoretical explorations of DNN properties, and a starting point for the challenge of sparse training.
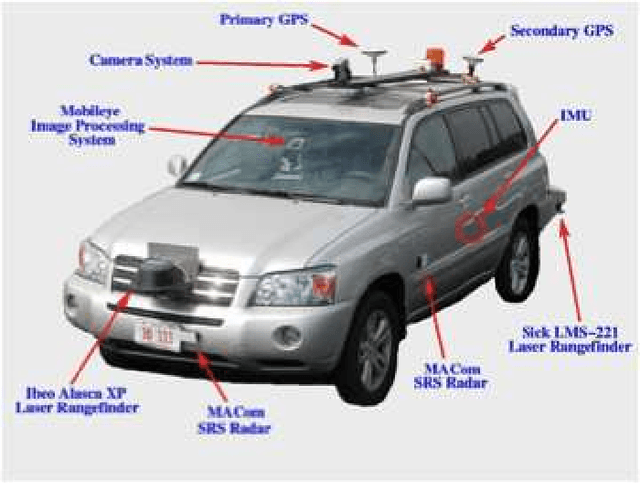
A Framework for Estimating Long Term Driver Behavior
Jul 11, 2016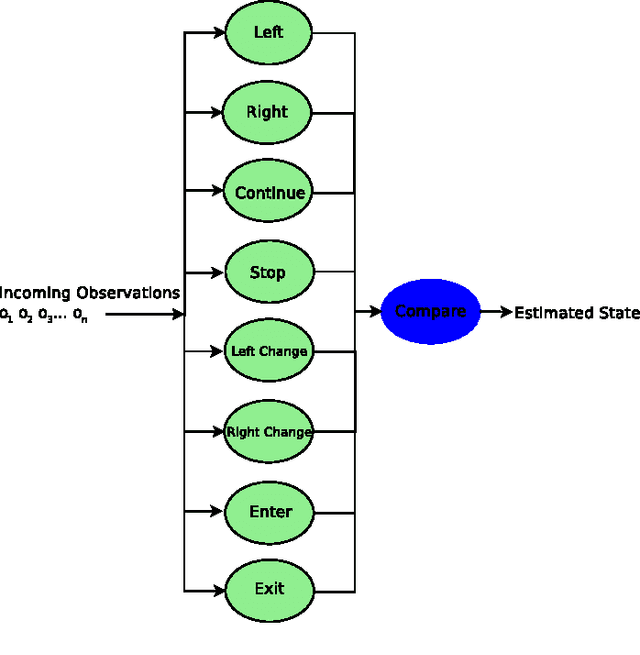
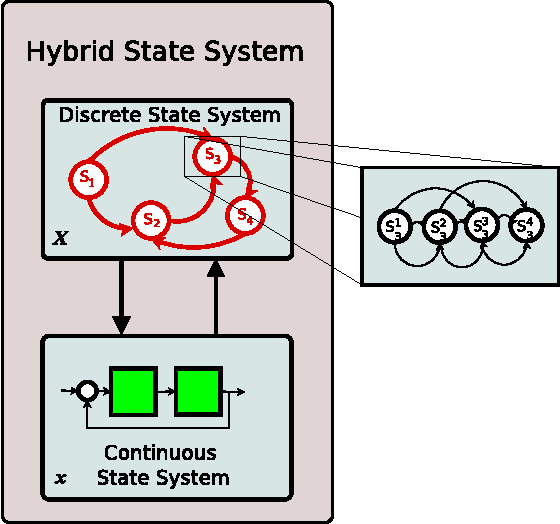
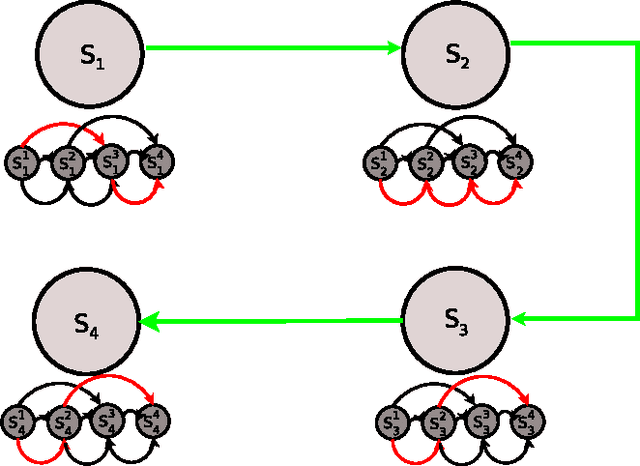
The authors present a cyber-physical systems study on the estimation of driver behavior in autonomous vehicles and vehicle safety systems. Extending upon previous work, the approach described is suitable for the long term estimation and tracking of autonomous vehicle behavior. The proposed system makes use of a previously defined Hybrid State System and Hidden Markov Model (HSS+HMM) system which has provided good results for driver behavior estimation. The HSS+HMM system utilizes the hybrid characteristics of decision-behavior coupling of many systems such as the driver and the vehicle, uses Kalman Filter estimates of observable parameters to track the instantaneous continuous state, and estimates the most likely driver state. The HSS+HMM system is encompassed in a HSS structure and inter-system connectivity is determined by using Signal Processing and Pattern Recognition techniques. The proposed method is suitable for scenarios that involve unknown decisions of other individuals, such as lane changes or intersection precedence/access. The long term driver behavior estimation system involves an extended HSS+HMM structure that is capable of including external information in the estimation process. Through the grafting and pruning of metastates, the HSS+HMM system can be dynamically updated to best represent driver choices given external information. Three application examples are also provided to elucidate the theoretical system.
Large Enforced Sparse Non-Negative Matrix Factorization
Oct 18, 2015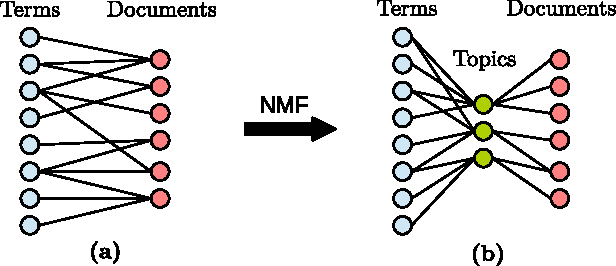
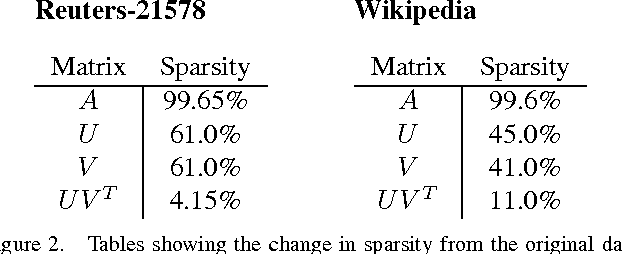
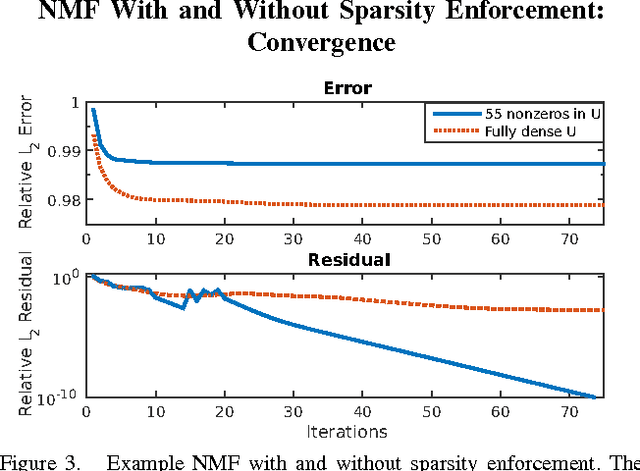
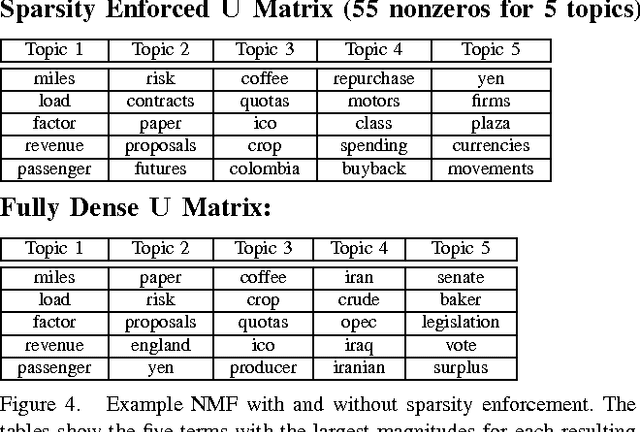
Non-negative matrix factorization (NMF) is a common method for generating topic models from text data. NMF is widely accepted for producing good results despite its relative simplicity of implementation and ease of computation. One challenge with applying NMF to large datasets is that intermediate matrix products often become dense, stressing the memory and compute elements of a system. In this article, we investigate a simple but powerful modification of a common NMF algorithm that enforces the generation of sparse intermediate and output matrices. This method enables the application of NMF to large datasets through improved memory and compute performance. Further, we demonstrate empirically that this method of enforcing sparsity in the NMF either preserves or improves both the accuracy of the resulting topic model and the convergence rate of the underlying algorithm.
A Hands-on Education Program on Cyber Physical Systems for High School Students
Aug 03, 2014
Cyber Physical Systems (CPS) are the conjoining of an entities' physical and computational elements. The development of a typical CPS system follows a sequence from conceptual modeling, testing in simulated (virtual) worlds, testing in controlled (possibly laboratory) environments and finally deployment. Throughout each (repeatable) stage, the behavior of the physical entities, the sensing and situation assessment, and the computation and control options have to be understood and carefully represented through abstraction. The CPS Group at the Ohio State University, as part of an NSF funded CPS project on "Autonomous Driving in Mixed Environments", has been developing CPS related educational activities at the K-12, undergraduate and graduate levels. The aim of these educational activities is to train students in the principles and design issues in CPS and to broaden the participation in science and engineering. The project team has a strong commitment to impact STEM education across the entire K-20 community. In this paper, we focus on the K-12 community and present a two-week Summer Program for high school juniors and seniors that introduces them to the principles of CPS design and walks them through several of the design steps. We also provide an online repository that aids CPS researchers in providing a similar educational experience.