 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Discovered Intention-aware Transformer for Multi-modal Vehicle Trajectory Prediction
Apr 08, 2026Predicting vehicle trajectories plays an important role in autonomous driving and ITS applications. Although multiple deep learning algorithms are devised to predict vehicle trajectories, their reliant on specific graph structure (e.g., Graph Neural Network) or explicit intention labeling limit their flexibilities. In this study, we propose a pure Transformer-based network with multiple modals considering their neighboring vehicles. Two separate tracks are employed. One track focuses on predicting the trajectories while the other focuses on predicting the likelihood of each intention considering neighboring vehicles. Study finds that the two track design can increase the performance by separating spatial module from the trajectory generating module. Also, we find the the model can learn an ordered group of trajectories by predicting residual offsets among K trajectories.
An efficient model-free estimation of multiclass conditional probability
Aug 01, 2013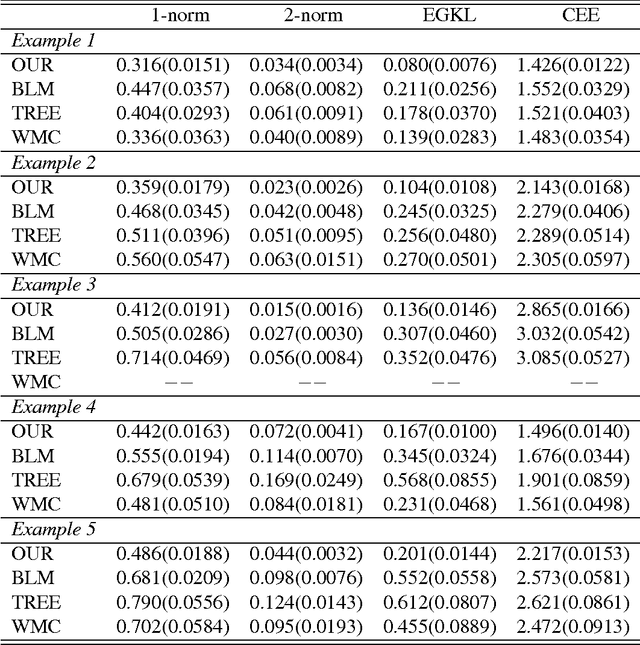

Conventional multiclass conditional probability estimation methods, such as Fisher's discriminate analysis and logistic regression, often require restrictive distributional model assumption. In this paper, a model-free estimation method is proposed to estimate multiclass conditional probability through a series of conditional quantile regression functions. Specifically, the conditional class probability is formulated as difference of corresponding cumulative distribution functions, where the cumulative distribution functions can be converted from the estimated conditional quantile regression functions. The proposed estimation method is also efficient as its computation cost does not increase exponentially with the number of classes. The theoretical and numerical studies demonstrate that the proposed estimation method is highly competitive against the existing competitors, especially when the number of classes is relatively large.