 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Evacuation for Multi-Drone Failure in Drone Light Shows
Jan 11, 2026Drone light shows have emerged as a popular form of entertainment in recent years. However, several high-profile incidents involving large-scale drone failures -- where multiple drones simultaneously fall from the sky -- have raised safety and reliability concerns. To ensure robustness, we propose a drone parking algorithm designed specifically for multiple drone failures in drone light shows, aimed at mitigating the risk of cascading collisions by drone evacuation and enabling rapid recovery from failures by leveraging strategically placed hidden drones. Our algorithm integrates a Social LSTM model with attention mechanisms to predict the trajectories of failing drones and compute near-optimal evacuation paths that minimize the likelihood of surviving drones being hit by fallen drones. In the recovery node, our system deploys hidden drones (operating with their LED lights turned off) to replace failed drones so that the drone light show can continue. Our experiments showed that our approach can greatly increase the robustness of a multi-drone system by leveraging deep learning to predict the trajectories of fallen drones.
Extending the Range of Drone-based Delivery Services by Exploration
Dec 17, 2020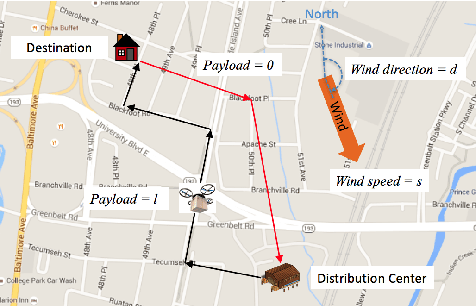
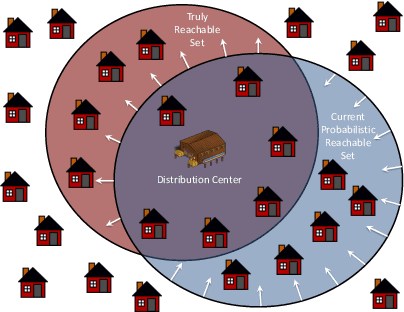
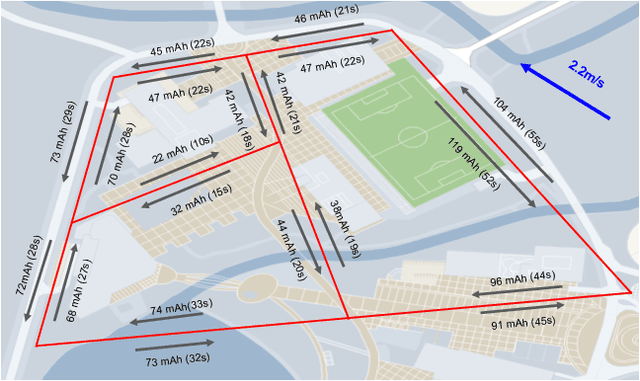
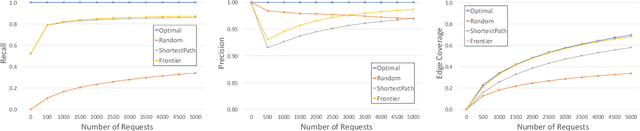
Drones have a fairly short range due to their limited battery life. We propose an adaptive exploration techniques to extend the range of drones by taking advantage of physical structures such as tall buildings and trees in urban environments. Our goal is to extend the coverage of a drone delivery service by generating paths for a drone to reach its destination while learning about the energy consumption on each edge on its path in order to optimize its range for future missions. We evaluated the performance of our exploration strategy in finding the set of all reachable destinations in a city, and found that exploring locations near the boundary of the reachable sets according to the current energy model can speed up the learning process.