 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Modular Mobility: Industry Advancements, Research Trends, and Future Directions on Modular Autonomous Vehicles
Dec 23, 2024Modular autonomous vehicles (MAVs) represent a transformative paradigm in the rapidly advancing field of autonomous vehicle technology. The integration of modularity offers numerous advantages, poised to reshape urban mobility systems and foster innovation in this emerging domain. Although publications on MAVs have only gained traction in the past five years, these pioneering efforts are critical for envisioning the future of modular mobility. This work provides a comprehensive review of industry and academic contributions to MAV development up to 2024, encompassing conceptualization, design, and applications in both passenger and logistics transport. The review systematically defines MAVs and outlines their technical framework, highlighting groundbreaking efforts in vehicular conceptualization, system design, and business models by the automotive industry and emerging mobility service providers. It also synthesizes academic research on key topics, including passenger and logistics transport, and their integration within future mobility ecosystems. The review concludes by identifying challenges, summarizing the current state of the art, and proposing future research directions to advance the development of modular autonomous mobility systems.
Exploring the impact of spatiotemporal granularity on the demand prediction of dynamic ride-hailing
Mar 19, 2022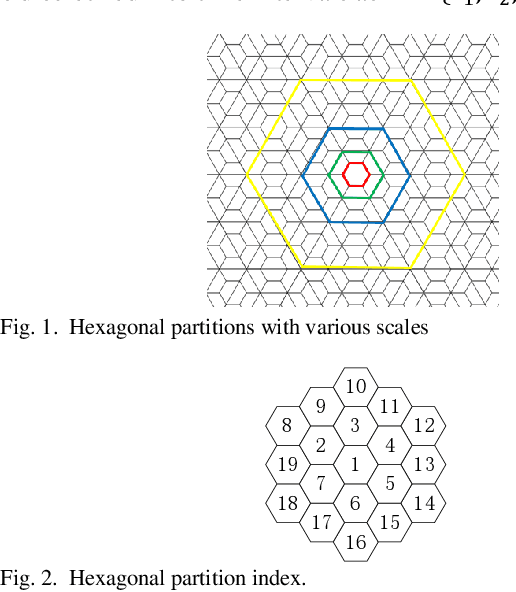
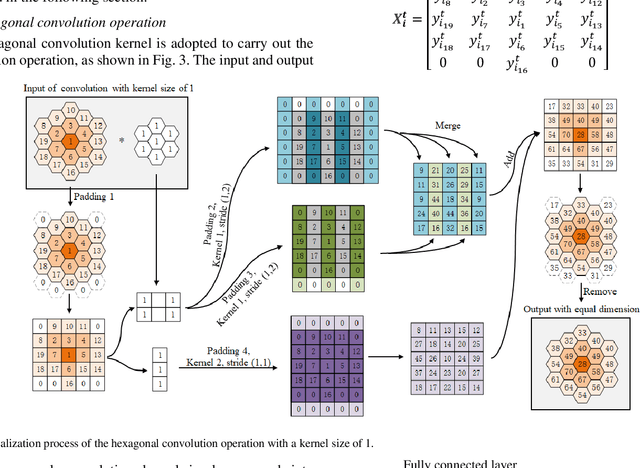
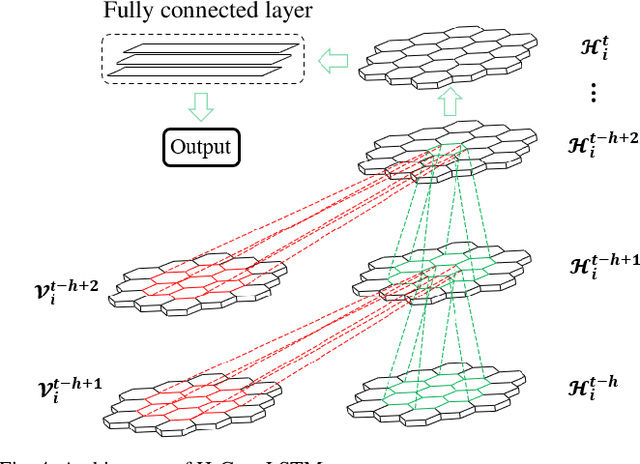
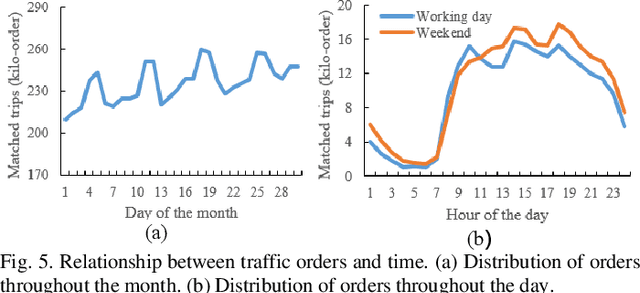
Dynamic demand prediction is a key issue in ride-hailing dispatching. Many methods have been developed to improve the demand prediction accuracy of an increase in demand-responsive, ride-hailing transport services. However, the uncertainties in predicting ride-hailing demands due to multiscale spatiotemporal granularity, as well as the resulting statistical errors, are seldom explored. This paper attempts to fill this gap and to examine the spatiotemporal granularity effects on ride-hailing demand prediction accuracy by using empirical data for Chengdu, China. A convolutional, long short-term memory model combined with a hexagonal convolution operation (H-ConvLSTM) is proposed to explore the complex spatial and temporal relations. Experimental analysis results show that the proposed approach outperforms conventional methods in terms of prediction accuracy. A comparison of 36 spatiotemporal granularities with both departure demands and arrival demands shows that the combination of a hexagonal spatial partition with an 800 m side length and a 30 min time interval achieves the best comprehensive prediction accuracy. However, the departure demands and arrival demands reveal different variation trends in the prediction errors for various spatiotemporal granularities.