 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArtifacts of Idiosyncracy in Global Street View Data
May 16, 2025Street view data is increasingly being used in computer vision applications in recent years. Machine learning datasets are collected for these applications using simple sampling techniques. These datasets are assumed to be a systematic representation of cities, especially when densely sampled. Prior works however, show that there are clear gaps in coverage, with certain cities or regions being covered poorly or not at all. Here we demonstrate that a cities' idiosyncracies, such as city layout, may lead to biases in street view data for 28 cities across the globe, even when they are densely covered. We quantitatively uncover biases in the distribution of coverage of street view data and propose a method for evaluation of such distributions to get better insight in idiosyncracies in a cities' coverage. In addition, we perform a case study of Amsterdam with semi-structured interviews, showing how idiosyncracies of the collection process impact representation of cities and regions and allowing us to address biases at their source.
Inside Out Visual Place Recognition
Nov 26, 2021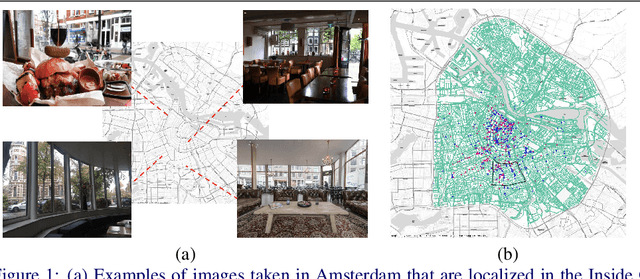
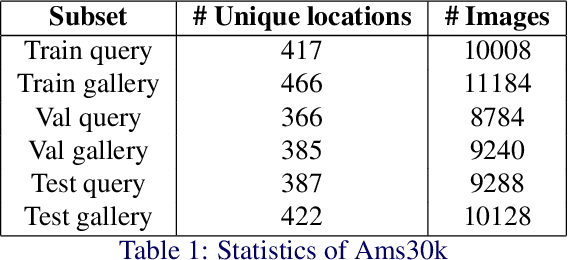
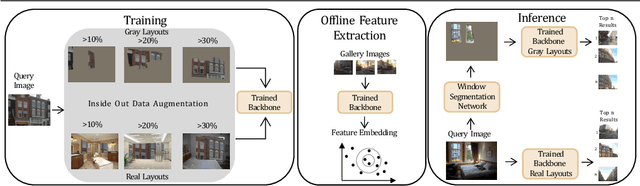
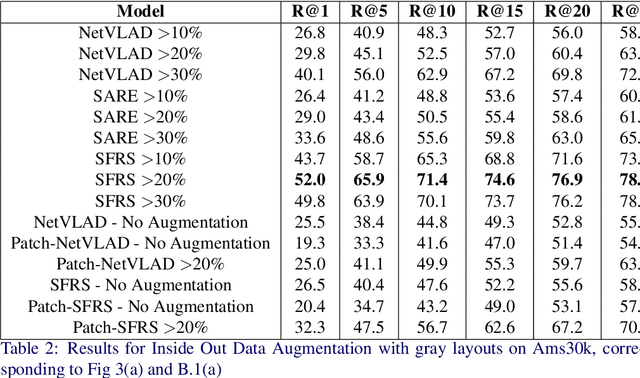
Visual Place Recognition (VPR) is generally concerned with localizing outdoor images. However, localizing indoor scenes that contain part of an outdoor scene can be of large value for a wide range of applications. In this paper, we introduce Inside Out Visual Place Recognition (IOVPR), a task aiming to localize images based on outdoor scenes visible through windows. For this task we present the new large-scale dataset Amsterdam-XXXL, with images taken in Amsterdam, that consists of 6.4 million panoramic street-view images and 1000 user-generated indoor queries. Additionally, we introduce a new training protocol Inside Out Data Augmentation to adapt Visual Place Recognition methods for localizing indoor images, demonstrating the potential of Inside Out Visual Place Recognition. We empirically show the benefits of our proposed data augmentation scheme on a smaller scale, whilst demonstrating the difficulty of this large-scale dataset for existing methods. With this new task we aim to encourage development of methods for IOVPR. The dataset and code are available for research purposes at https://github.com/saibr/IOVPR