 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWide-Area Geolocalization with a Limited Field of View Camera in Challenging Urban Environments
Aug 14, 2023



Cross-view geolocalization, a supplement or replacement for GPS, localizes an agent within a search area by matching ground-view images to overhead images. Significant progress has been made assuming a panoramic ground camera. Panoramic cameras' high complexity and cost make non-panoramic cameras more widely applicable, but also more challenging since they yield less scene overlap between ground and overhead images. This paper presents Restricted FOV Wide-Area Geolocalization (ReWAG), a cross-view geolocalization approach that combines a neural network and particle filter to globally localize a mobile agent with only odometry and a non-panoramic camera. ReWAG creates pose-aware embeddings and provides a strategy to incorporate particle pose into the Siamese network, improving localization accuracy by a factor of 100 compared to a vision transformer baseline. This extended work also presents ReWAG*, which improves upon ReWAG's generalization ability in previously unseen environments. ReWAG* repeatedly converges accurately on a dataset of images we have collected in Boston with a 72 degree field of view (FOV) camera, a location and FOV that ReWAG* was not trained on.
Wide-Area Geolocalization with a Limited Field of View Camera
Sep 23, 2022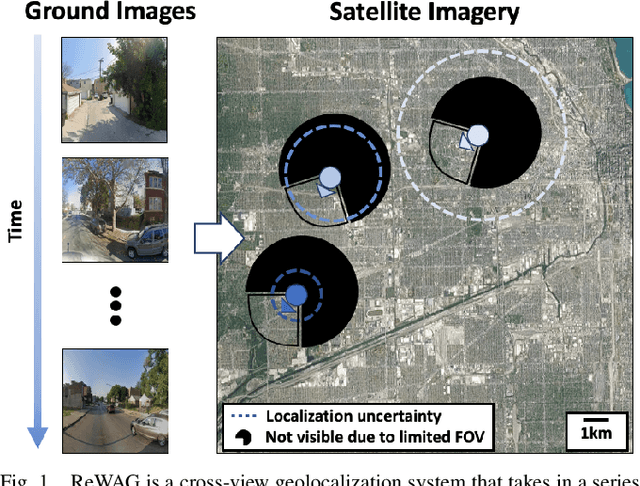
Cross-view geolocalization, a supplement or replacement for GPS, localizes an agent within a search area by matching images taken from a ground-view camera to overhead images taken from satellites or aircraft. Although the viewpoint disparity between ground and overhead images makes cross-view geolocalization challenging, significant progress has been made assuming that the ground agent has access to a panoramic camera. For example, our prior work (WAG) introduced changes in search area discretization, training loss, and particle filter weighting that enabled city-scale panoramic cross-view geolocalization. However, panoramic cameras are not widely used in existing robotic platforms due to their complexity and cost. Non-panoramic cross-view geolocalization is more applicable for robotics, but is also more challenging. This paper presents Restricted FOV Wide-Area Geolocalization (ReWAG), a cross-view geolocalization approach that generalizes WAG for use with standard, non-panoramic ground cameras by creating pose-aware embeddings and providing a strategy to incorporate particle pose into the Siamese network. ReWAG is a neural network and particle filter system that is able to globally localize a mobile agent in a GPS-denied environment with only odometry and a 90 degree FOV camera, achieving similar localization accuracy as what WAG achieved with a panoramic camera and improving localization accuracy by a factor of 100 compared to a baseline vision transformer (ViT) approach. A video highlight that demonstrates ReWAG's convergence on a test path of several dozen kilometers is available at https://youtu.be/U_OBQrt8qCE.
City-wide Street-to-Satellite Image Geolocalization of a Mobile Ground Agent
Mar 10, 2022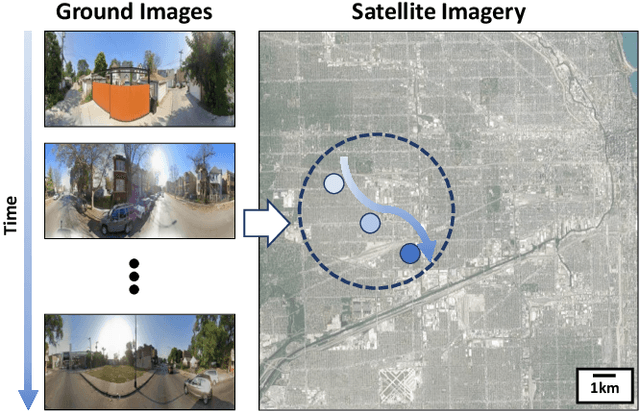
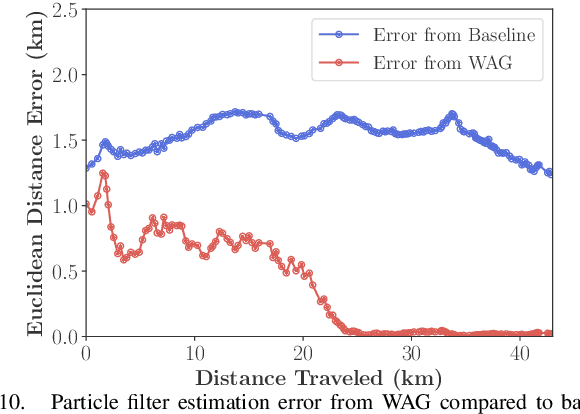
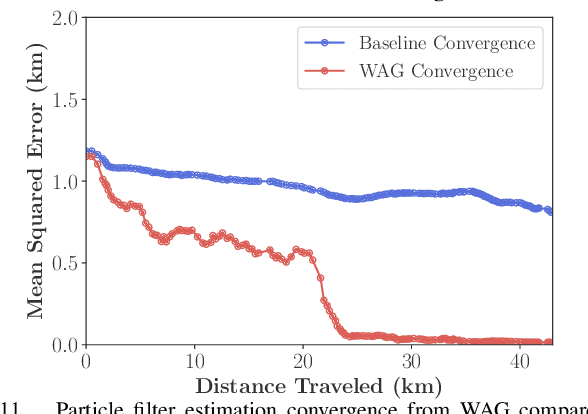
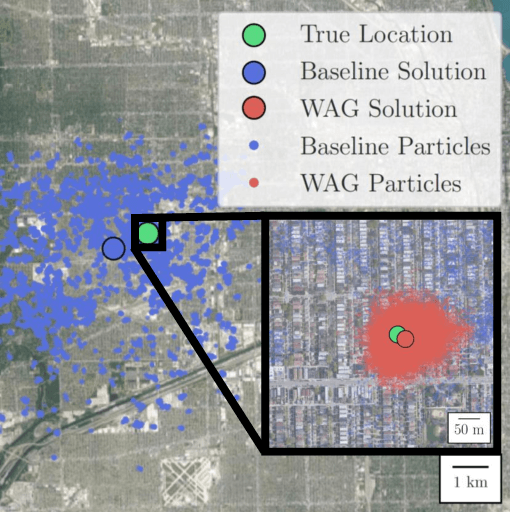
Cross-view image geolocalization provides an estimate of an agent's global position by matching a local ground image to an overhead satellite image without the need for GPS. It is challenging to reliably match a ground image to the correct satellite image since the images have significant viewpoint differences. Existing works have demonstrated localization in constrained scenarios over small areas but have not demonstrated wider-scale localization. Our approach, called Wide-Area Geolocalization (WAG), combines a neural network with a particle filter to achieve global position estimates for agents moving in GPS-denied environments, scaling efficiently to city-scale regions. WAG introduces a trinomial loss function for a Siamese network to robustly match non-centered image pairs and thus enables the generation of a smaller satellite image database by coarsely discretizing the search area. A modified particle filter weighting scheme is also presented to improve localization accuracy and convergence. Taken together, WAG's network training and particle filter weighting approach achieves city-scale position estimation accuracies on the order of 20 meters, a 98% reduction compared to a baseline training and weighting approach. Applied to a smaller-scale testing area, WAG reduces the final position estimation error by 64% compared to a state-of-the-art baseline from the literature. WAG's search space discretization additionally significantly reduces storage and processing requirements.
Lunar Terrain Relative Navigation Using a Convolutional Neural Network for Visual Crater Detection
Jul 15, 2020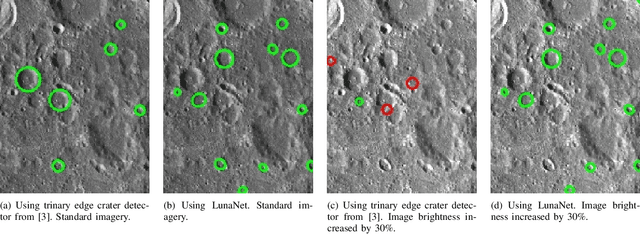
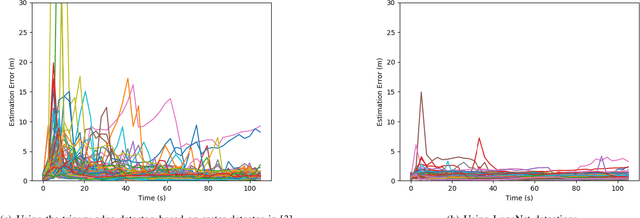
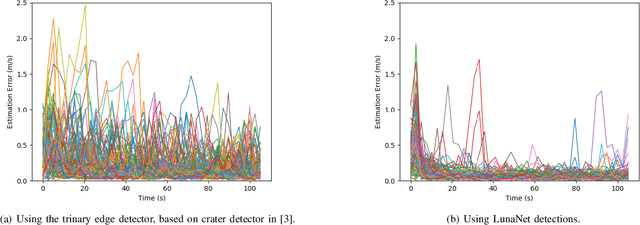
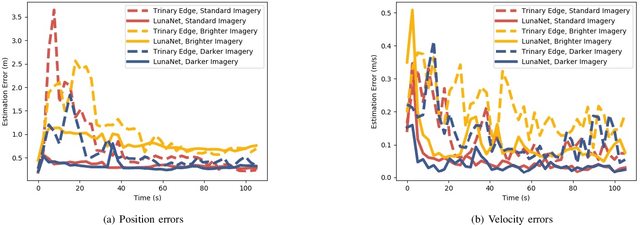
Terrain relative navigation can improve the precision of a spacecraft's position estimate by detecting global features that act as supplementary measurements to correct for drift in the inertial navigation system. This paper presents a system that uses a convolutional neural network (CNN) and image processing methods to track the location of a simulated spacecraft with an extended Kalman filter (EKF). The CNN, called LunaNet, visually detects craters in the simulated camera frame and those detections are matched to known lunar craters in the region of the current estimated spacecraft position. These matched craters are treated as features that are tracked using the EKF. LunaNet enables more reliable position tracking over a simulated trajectory due to its greater robustness to changes in image brightness and more repeatable crater detections from frame to frame throughout a trajectory. LunaNet combined with an EKF produces a decrease of 60% in the average final position estimation error and a decrease of 25% in average final velocity estimation error compared to an EKF using an image processing-based crater detection method when tested on trajectories using images of standard brightness.
Collision Probabilities for Continuous-Time Systems Without Sampling [with Appendices]
Jun 01, 2020![Figure 1 for Collision Probabilities for Continuous-Time Systems Without Sampling [with Appendices]](/_next/image?url=https%3A%2F%2Fai2-s2-public.s3.amazonaws.com%2Ffigures%2F2017-08-08%2Ff268865ee371d32400b4654be49f6475852c5d2e%2F1-Figure1-1.png&w=640&q=75)
![Figure 2 for Collision Probabilities for Continuous-Time Systems Without Sampling [with Appendices]](/_next/image?url=https%3A%2F%2Fai2-s2-public.s3.amazonaws.com%2Ffigures%2F2017-08-08%2Ff268865ee371d32400b4654be49f6475852c5d2e%2F5-Figure2-1.png&w=640&q=75)
![Figure 3 for Collision Probabilities for Continuous-Time Systems Without Sampling [with Appendices]](/_next/image?url=https%3A%2F%2Fai2-s2-public.s3.amazonaws.com%2Ffigures%2F2017-08-08%2Ff268865ee371d32400b4654be49f6475852c5d2e%2F7-Figure3-1.png&w=640&q=75)
![Figure 4 for Collision Probabilities for Continuous-Time Systems Without Sampling [with Appendices]](/_next/image?url=https%3A%2F%2Fai2-s2-public.s3.amazonaws.com%2Ffigures%2F2017-08-08%2Ff268865ee371d32400b4654be49f6475852c5d2e%2F8-Figure4-1.png&w=640&q=75)
Demand for high-performance, robust, and safe autonomous systems has grown substantially in recent years. Fulfillment of these objectives requires accurate and efficient risk estimation that can be embedded in core decision-making tasks such as motion planning. On one hand, Monte-Carlo (MC) and other sampling-based techniques can provide accurate solutions for a wide variety of motion models but are cumbersome to apply in the context of continuous optimization. On the other hand, "direct" approximations aim to compute (or upper-bound) the failure probability as a smooth function of the decision variables, and thus are widely applicable. However, existing approaches fundamentally assume discrete-time dynamics and can perform unpredictably when applied to continuous-time systems operating in the real world, often manifesting as severe conservatism. State-of-the-art attempts to address this within a conventional discrete-time framework require additional Gaussianity approximations that ultimately produce inconsistency of their own. In this paper we take a fundamentally different approach, deriving a risk approximation framework directly in continuous time and producing a lightweight estimate that actually improves as the discretization is refined. Our approximation is shown to significantly outperform state-of-the-art techniques in replicating the MC estimate while maintaining the functional and computational benefits of a direct method. This enables robust, risk-aware, continuous motion-planning for a broad class of nonlinear, partially-observable systems.
Towards Online Observability-Aware Trajectory Optimization for Landmark-based Estimators
Aug 27, 2019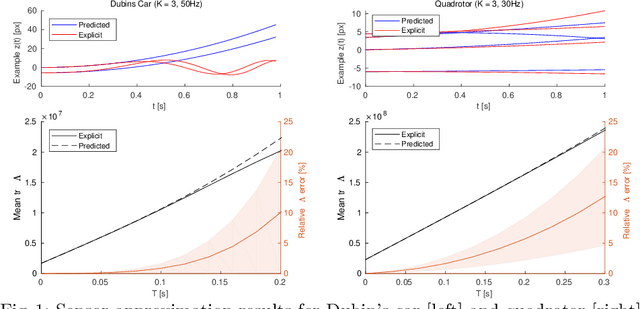
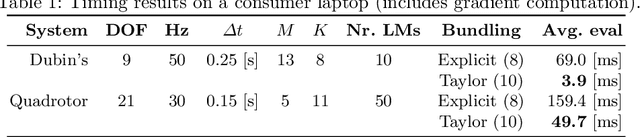
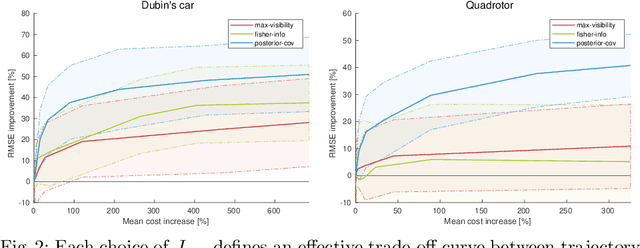
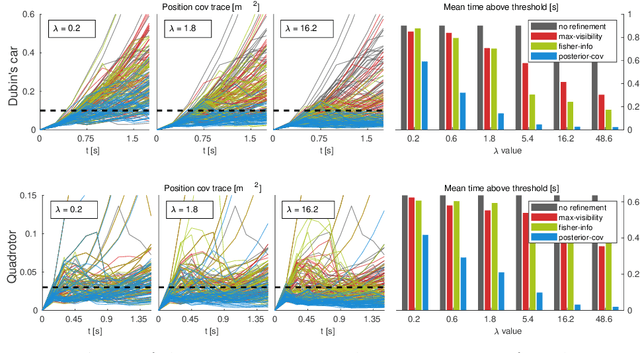
As autonomous systems rely increasingly on onboard sensors for localization and perception, the parallel tasks of motion planning and uncertainty minimization become increasingly coupled. This coupling is well-captured by augmenting the planning objective with a posterior-covariance penalty -- however, online optimization can be computationally intractable, particularly for observation models with latent environmental dependencies (e.g., unknown landmarks). This paper addresses a number of fundamental challenges in efficient minimization of the posterior covariance. First, we provide a measurement bundling approximation that enables high-rate sensors to be approximated with fewer, low-rate updates. This allows for landmark marginalization (crucial in the case of unknown landmarks), for which we provide a novel recipe for computing the gradients necessary for optimization. Finally, we identify a large class of measurement models for which the contributions from each landmark can be combined, so evaluation of the total information gained at each timestep can be carried out (nearly) independently of the number of landmarks. We evaluate our trajectory-generation framework for both a Dubin's car and a quadrotor, demonstrating significant estimation improvement and moderate computation time.
Efficient Constellation-Based Map-Merging for Semantic SLAM
Mar 05, 2019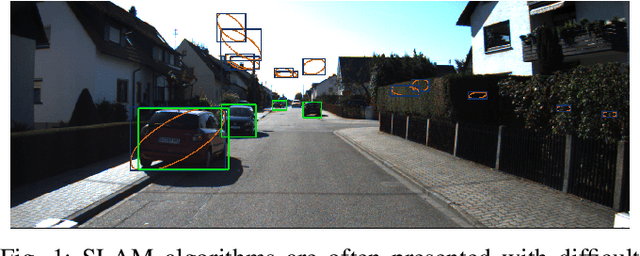
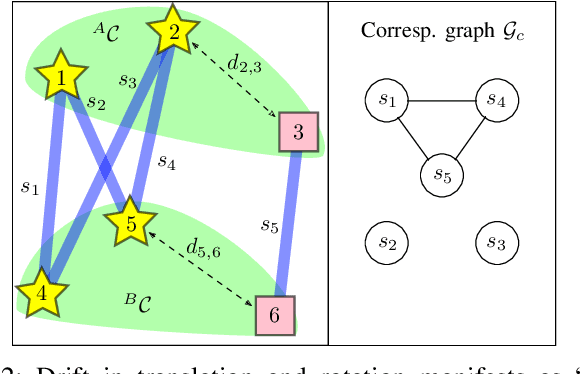
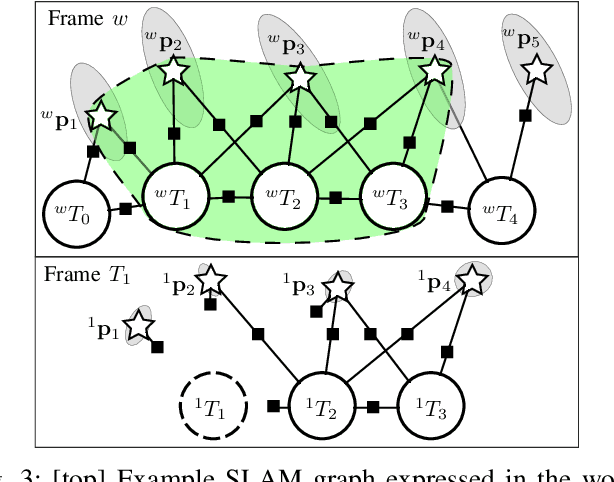
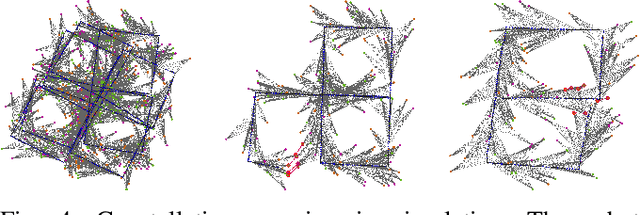
Data association in SLAM is fundamentally challenging, and handling ambiguity well is crucial to achieve robust operation in real-world environments. When ambiguous measurements arise, conservatism often mandates that the measurement is discarded or a new landmark is initialized rather than risking an incorrect association. To address the inevitable `duplicate' landmarks that arise, we present an efficient map-merging framework to detect duplicate constellations of landmarks, providing a high-confidence loop-closure mechanism well-suited for object-level SLAM. This approach uses an incrementally-computable approximation of landmark uncertainty that only depends on local information in the SLAM graph, avoiding expensive recovery of the full system covariance matrix. This enables a search based on geometric consistency (GC) (rather than full joint compatibility (JC)) that inexpensively reduces the search space to a handful of `best' hypotheses. Furthermore, we reformulate the commonly-used interpretation tree to allow for more efficient integration of clique-based pairwise compatibility, accelerating the branch-and-bound max-cardinality search. Our method is demonstrated to match the performance of full JC methods at significantly-reduced computational cost, facilitating robust object-based loop-closure over large SLAM problems.
Complexity Analysis and Efficient Measurement Selection Primitives for High-Rate Graph SLAM
Mar 02, 2018
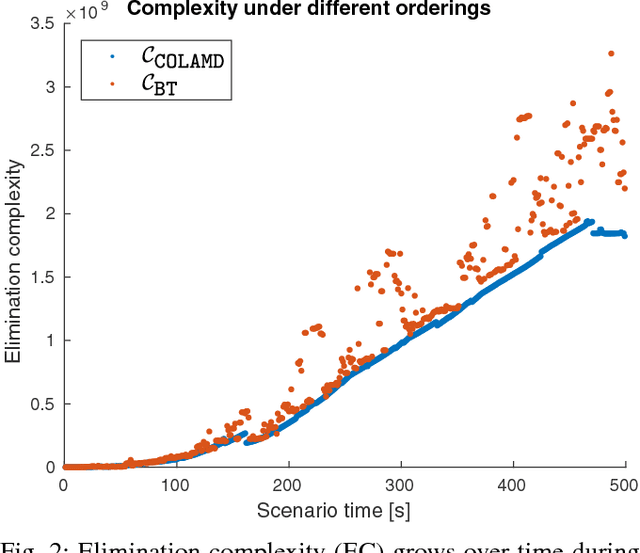
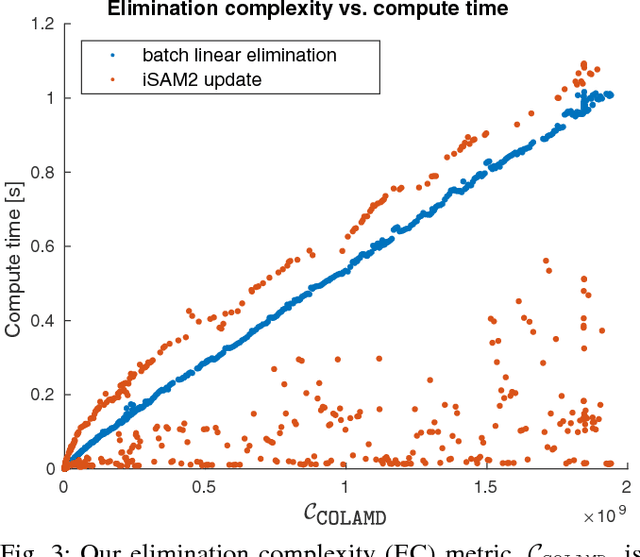
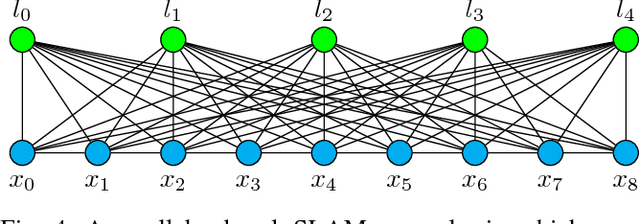
Sparsity has been widely recognized as crucial for efficient optimization in graph-based SLAM. Because the sparsity and structure of the SLAM graph reflect the set of incorporated measurements, many methods for sparsification have been proposed in hopes of reducing computation. These methods often focus narrowly on reducing edge count without regard for structure at a global level. Such structurally-naive techniques can fail to produce significant computational savings, even after aggressive pruning. In contrast, simple heuristics such as measurement decimation and keyframing are known empirically to produce significant computation reductions. To demonstrate why, we propose a quantitative metric called elimination complexity (EC) that bridges the existing analytic gap between graph structure and computation. EC quantifies the complexity of the primary computational bottleneck: the factorization step of a Gauss-Newton iteration. Using this metric, we show rigorously that decimation and keyframing impose favorable global structures and therefore achieve computation reductions on the order of $r^2/9$ and $r^3$, respectively, where $r$ is the pruning rate. We additionally present numerical results showing EC provides a good approximation of computation in both batch and incremental (iSAM2) optimization and demonstrate that pruning methods promoting globally-efficient structure outperform those that do not.