 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe body image of social robots
Feb 07, 2023The rapid development of social robots has challenged robotics and cognitive sciences to understand humans' perception of the appearance of robots. In this study, robot-associated words spontaneously generated by humans were analyzed to semantically reveal the body image of 30 robots that have been developed over the past decades. The analyses took advantage of word affect scales and embedding vectors, and provided a series of evidence for links between human perception and body image. It was found that the valence and dominance of the body image reflected humans' attitude towards the general concept of robots; that the user bases and usages of the robots were among the primary factors influencing humans' impressions towards individual robots; and that there was a relationship between the robots' affects and semantic distances to the word ``person''. According to the results, building body image for robots was an effective paradigm to investigate which features were appreciated by people and what influenced people's feelings towards robots.
The Effect of Robot Posture and Idle Motion on Spontaneous Emotional Contagion during Robot-Human Interactions
Sep 02, 2022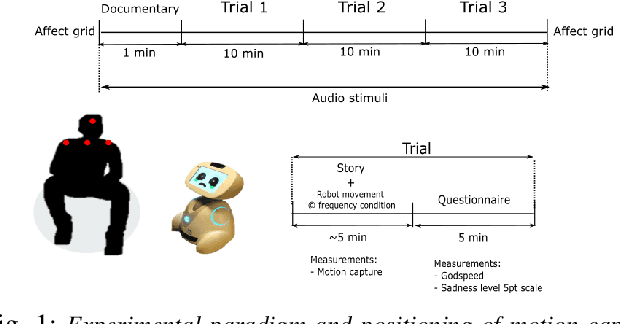

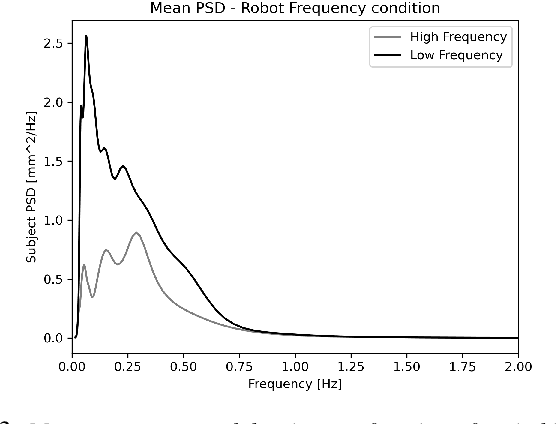
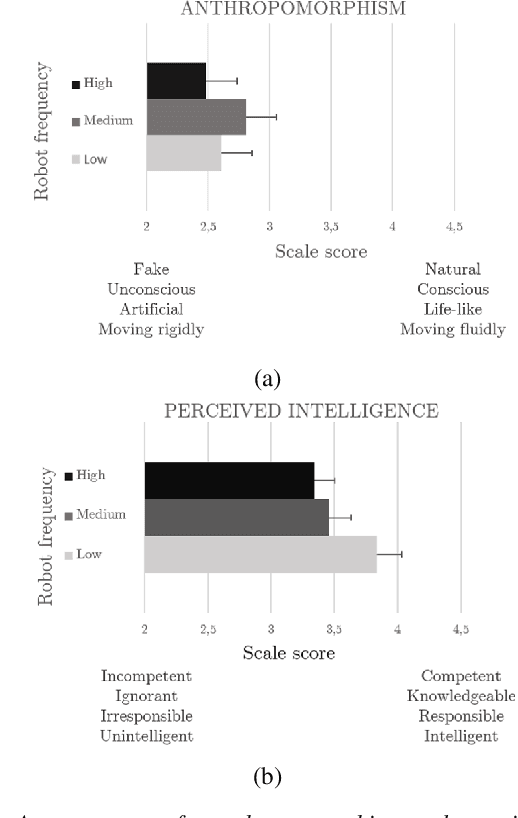
In the next decade, social robots will be implemented in many public spaces to provide services to humans. We question the properties of these social robots to afford acceptance and spontaneous emotional interactions. More specifically, in the present study, we report the effects of idle motion frequency in a robot on emotional contagion in a face-to-face interactive task with a human participant. The robotic system Buddy was programmed to adopt a sad posture and facial expression while telling three sad stories and moving its head up/down at low, medium, and high frequency. Each participant (N=15 total) was invited to sit in front of Buddy and listen to the stories. Unconscious changes in posture in the human participant were recorded using a 3D motion capture system (Qualysis). Results show greater inclinations of the shoulder/torso towards the ground in low-frequency trials and more rigid postures in high-frequency trials. The quantity of spontaneous movement was also greater when Buddy moved at slow frequencies. These findings echo results reported in experimental psychology when two individuals are engaged in social interactions. The scores obtained in the Godspeed questionnaire further suggest that emotional contagion may occur when Buddy moves slowly because the robotic system is perceived as more natural and knowledgeable, e.g., at speed coherent with the expressed emotion. Our work explores the importance of body posture and frequency of idle motion in the conception of robotic systems. Such additions could provide social robots that afford emotional contagion in effortless robot-human collaborative tasks.