 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeipc_shared_ptr: A Publish/Subscribe-Aware Smart Pointer for Cross-Process Object Lifetime Management
May 05, 2026True zero-copy Inter-Process Communication (IPC) in publish/subscribe (pub/sub) middleware such as Robot Operating System 2 (ROS 2) requires subscribers to reference message objects in publisher-owned shared memory. Objects must not be reclaimed while referenced, yet must eventually be reclaimed, with correct handling of crash recovery and Transient Local QoS retention requirements. We propose ipc_shared_ptr, a pub/sub-aware smart pointer for cross-process message lifetime management. ipc_shared_ptr exploits pub/sub structural properties to specialize Birrell's reference listing, limiting global metadata updates to per-subscriber 0<->1 transitions and achieving an order-of-magnitude reduction in global communication over general-purpose distributed reference counting. We analyze the key metadata management tradeoff: scalability versus implementation simplicity. Owner-driven reclaim offers greater scalability, but concurrent membership changes and reclamation decisions produce races that widen the correctness-verification state space. Single-writer achieves structural atomicity, eliminating this complexity at the cost of a centralized bottleneck. iceoryx2 (owner-driven reclaim) and Agnocast -- a true zero-copy ROS 2 IPC middleware sharing the publisher's heap with subscribers and adopting ipc_shared_ptr with single-writer -- embody each architecture. Comparative evaluation at the scale of Autoware -- the largest open-source ROS 2 application -- confirms that single-writer achieves sufficient scalability: at 200 topics, two subscribers per topic and 100 Hz, Agnocast's E2E p99.9 is 2.9x lower than iceoryx2's, justifying implementation simplicity over owner-driven reclaim.
SC-MII: Infrastructure LiDAR-based 3D Object Detection on Edge Devices for Split Computing with Multiple Intermediate Outputs Integration
Jan 12, 20263D object detection using LiDAR-based point cloud data and deep neural networks is essential in autonomous driving technology. However, deploying state-of-the-art models on edge devices present challenges due to high computational demands and energy consumption. Additionally, single LiDAR setups suffer from blind spots. This paper proposes SC-MII, multiple infrastructure LiDAR-based 3D object detection on edge devices for Split Computing with Multiple Intermediate outputs Integration. In SC-MII, edge devices process local point clouds through the initial DNN layers and send intermediate outputs to an edge server. The server integrates these features and completes inference, reducing both latency and device load while improving privacy. Experimental results on a real-world dataset show a 2.19x speed-up and a 71.6% reduction in edge device processing time, with at most a 1.09% drop in accuracy.
D-AWSIM: Distributed Autonomous Driving Simulator for Dynamic Map Generation Framework
Nov 12, 2025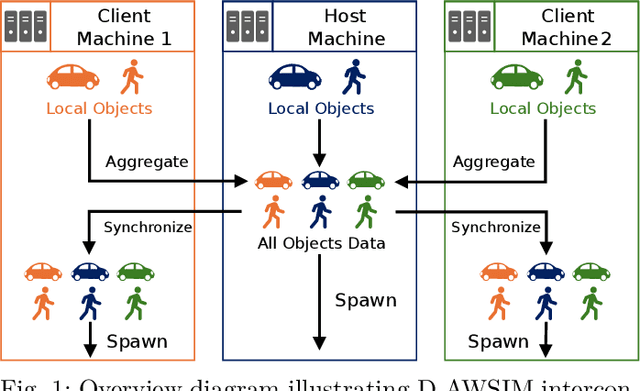
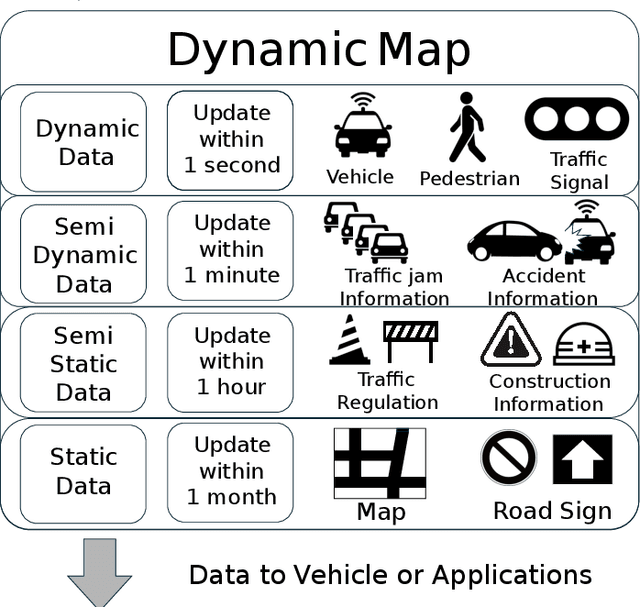
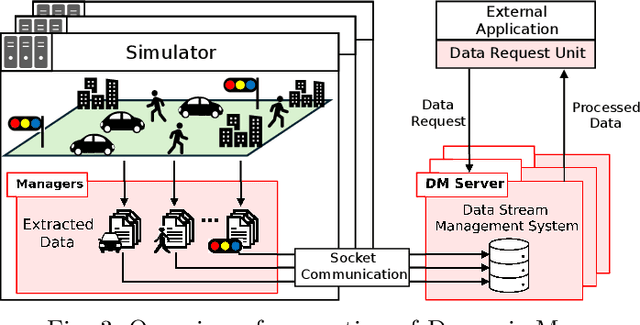
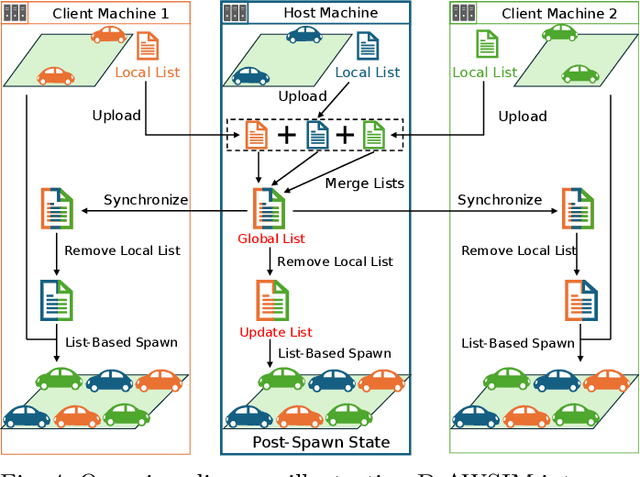
Autonomous driving systems have achieved significant advances, and full autonomy within defined operational design domains near practical deployment. Expanding these domains requires addressing safety assurance under diverse conditions. Information sharing through vehicle-to-vehicle and vehicle-to-infrastructure communication, enabled by a Dynamic Map platform built from vehicle and roadside sensor data, offers a promising solution. Real-world experiments with numerous infrastructure sensors incur high costs and regulatory challenges. Conventional single-host simulators lack the capacity for large-scale urban traffic scenarios. This paper proposes D-AWSIM, a distributed simulator that partitions its workload across multiple machines to support the simulation of extensive sensor deployment and dense traffic environments. A Dynamic Map generation framework on D-AWSIM enables researchers to explore information-sharing strategies without relying on physical testbeds. The evaluation shows that D-AWSIM increases throughput for vehicle count and LiDAR sensor processing substantially compared to a single-machine setup. Integration with Autoware demonstrates applicability for autonomous driving research.
Generalized Inequality-based Approach for Probabilistic WCET Estimation
Nov 12, 2025Estimating the probabilistic Worst-Case Execution Time (pWCET) is essential for ensuring the timing correctness of real-time applications, such as in robot IoT systems and autonomous driving systems. While methods based on Extreme Value Theory (EVT) can provide tight bounds, they suffer from model uncertainty due to the need to decide where the upper tail of the distribution begins. Conversely, inequality-based approaches avoid this issue but can yield pessimistic results for heavy-tailed distributions. This paper proposes a method to reduce such pessimism by incorporating saturating functions (arctangent and hyperbolic tangent) into Chebyshev's inequality, which mitigates the influence of large outliers while preserving mathematical soundness. Evaluations on synthetic and real-world data from the Autoware autonomous driving stack demonstrate that the proposed method achieves safe and tighter bounds for such distributions.
Work in Progress: Middleware-Transparent Callback Enforcement in Commoditized Component-Oriented Real-time Systems
May 10, 2025Real-time scheduling in commoditized component-oriented real-time systems, such as ROS 2 systems on Linux, has been studied under nested scheduling: OS thread scheduling and middleware layer scheduling (e.g., ROS 2 Executor). However, by establishing a persistent one-to-one correspondence between callbacks and OS threads, we can ignore the middleware layer and directly apply OS scheduling parameters (e.g., scheduling policy, priority, and affinity) to individual callbacks. We propose a middleware model that enables this idea and implements CallbackIsolatedExecutor as a novel ROS 2 Executor. We demonstrate that the costs (user-kernel switches, context switches, and memory usage) of CallbackIsolatedExecutor remain lower than those of the MultiThreadedExecutor, regardless of the number of callbacks. Additionally, the cost of CallbackIsolatedExecutor relative to SingleThreadedExecutor stays within a fixed ratio (1.4x for inter-process and 5x for intra-process communication). Future ROS 2 real-time scheduling research can avoid nested scheduling, ignoring the existence of the middleware layer.
* 4 pages, 5 figures. Accepted for IEEE RTAS 2025; this is the author-accepted manuscript. Final version in IEEE Xplore: https://doi.org/10.1109/RTAS65571.2025.00017