 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiRoPro: An interactive Robot Programming Framework
Dec 08, 2021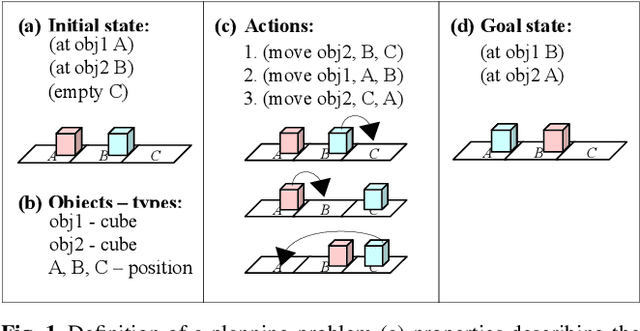
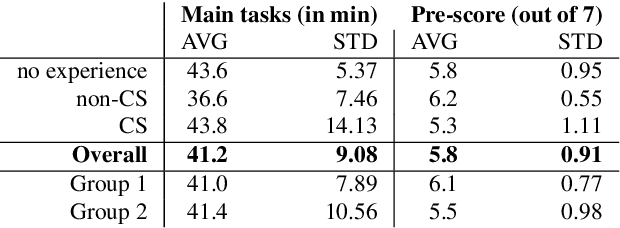
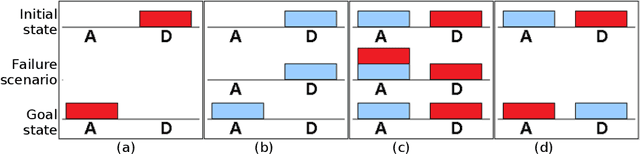
The great diversity of end-user tasks ranging from manufacturing environments to personal homes makes pre-programming robots for general purpose applications extremely challenging. In fact, teaching robots new actions from scratch that can be reused for previously unseen tasks remains a difficult challenge and is generally left up to robotics experts. In this work, we present iRoPro, an interactive Robot Programming framework that allows end-users with little to no technical background to teach a robot new reusable actions. We combine Programming by Demonstration and Automated Planning techniques to allow the user to construct the robot's knowledge base by teaching new actions by kinesthetic demonstration. The actions are generalised and reused with a task planner to solve previously unseen problems defined by the user. We implement iRoPro as an end-to-end system on a Baxter Research Robot to simultaneously teach low- and high-level actions by demonstration that the user can customise via a Graphical User Interface to adapt to their specific use case. To evaluate the feasibility of our approach, we first conducted pre-design experiments to better understand the user's adoption of involved concepts and the proposed robot programming process. We compare results with post-design experiments, where we conducted a user study to validate the usability of our approach with real end-users. Overall, we showed that users with different programming levels and educational backgrounds can easily learn and use iRoPro and its robot programming process.
* arXiv admin note: substantial text overlap with arXiv:2103.14342
End-User Programming of Low- and High-Level Actions for Robotic Task Planning
Mar 26, 2021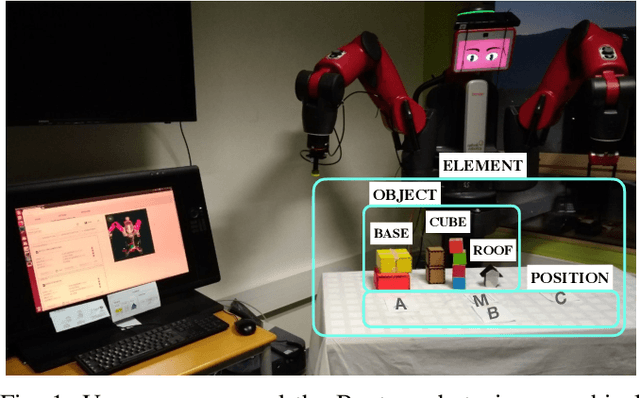
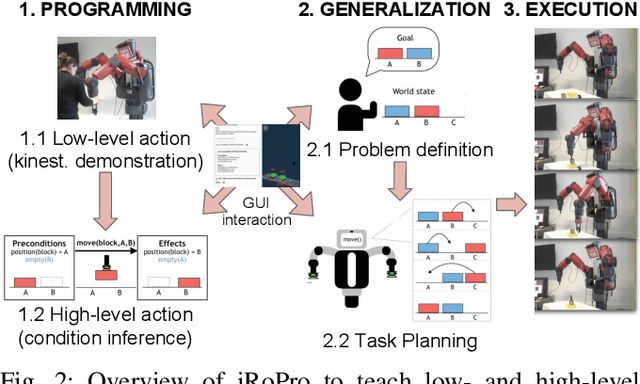
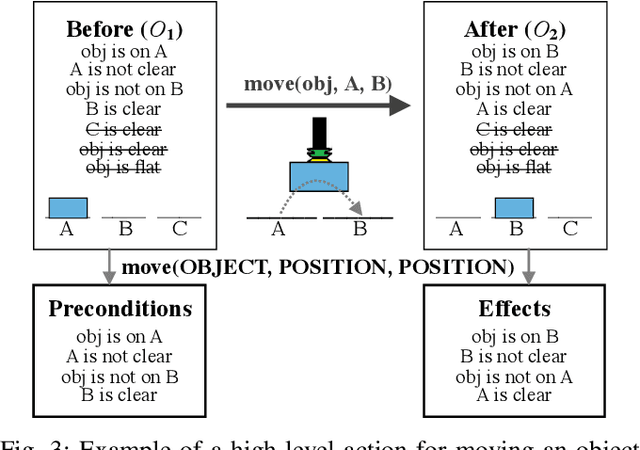
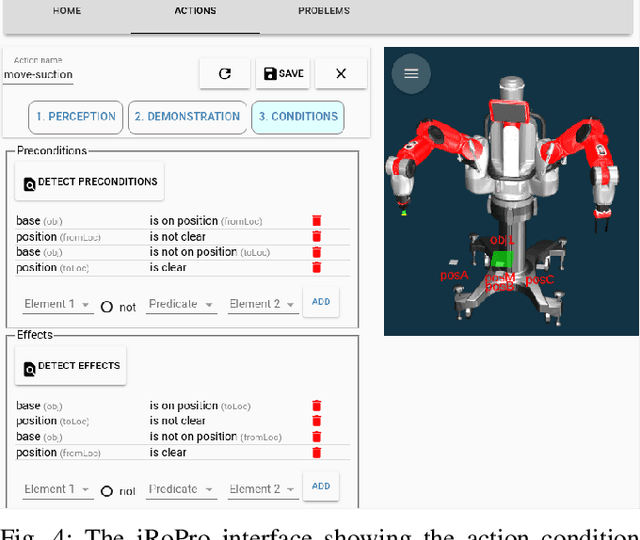
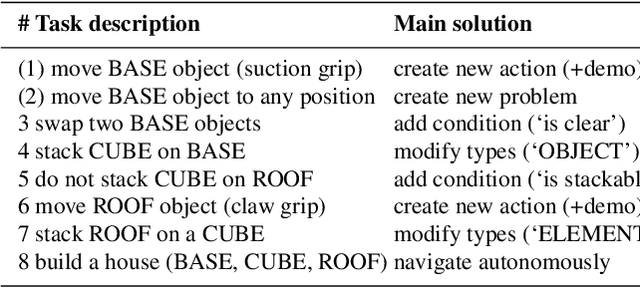
Programming robots for general purpose applications is extremely challenging due to the great diversity of end-user tasks ranging from manufacturing environments to personal homes. Recent work has focused on enabling end-users to program robots using Programming by Demonstration. However, teaching robots new actions from scratch that can be reused for unseen tasks remains a difficult challenge and is generally left up to robotic experts. We propose iRoPro, an interactive Robot Programming framework that allows end-users to teach robots new actions from scratch and reuse them with a task planner. In this work we provide a system implementation on a two-armed Baxter robot that (i) allows simultaneous teaching of low- and high-level actions by demonstration, (ii) includes a user interface for action creation with condition inference and modification, and (iii) allows creating and solving previously unseen problems using a task planner for the robot to execute in real-time. We evaluate the generalisation power of the system on six benchmark tasks and show how taught actions can be easily reused for complex tasks. We further demonstrate its usability with a user study (N=21), where users completed eight tasks to teach the robot new actions that are reused with a task planner. The study demonstrates that users with any programming level and educational background can easily learn and use the system.
* 8 pages, 6 figures, 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)
Une approche totalement instanciée pour la planification HTN
Oct 22, 2018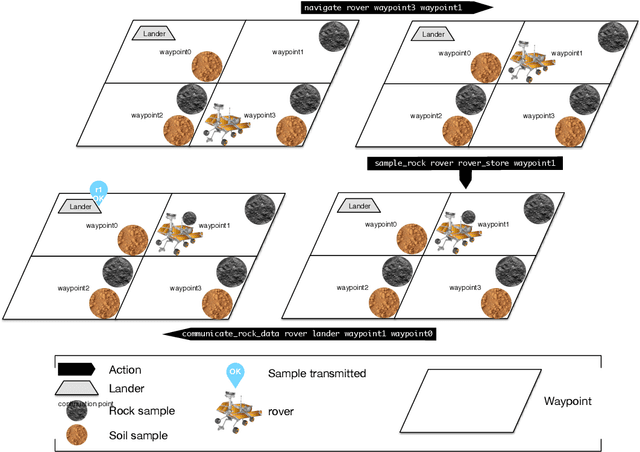
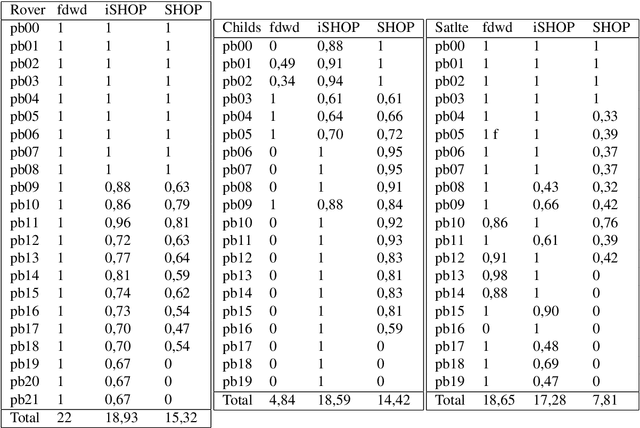
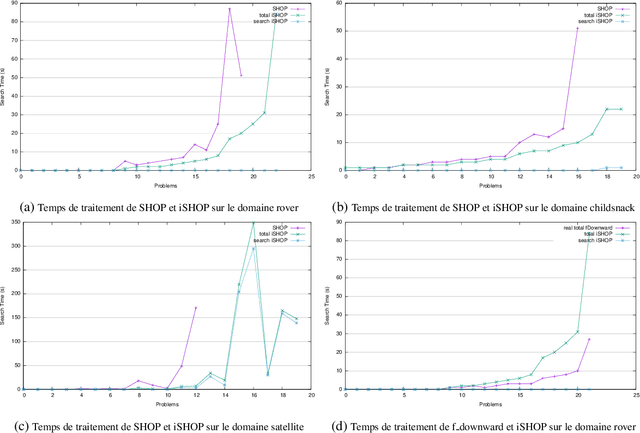
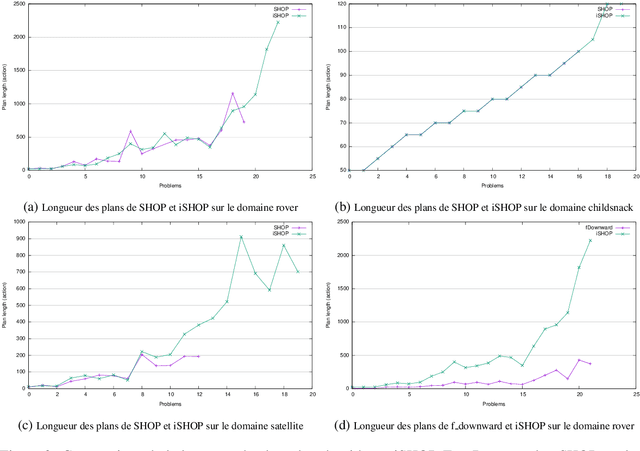
Many planning techniques have been developed to allow autonomous systems to act and make decisions based on their perceptions of the environment. Among these techniques, HTN ({\it Hierarchical Task Network}) planning is one of the most used in practice. Unlike classical approaches of planning. HTN operates by decomposing task into sub-tasks until each of these sub-tasks can be achieved an action. This hierarchical representation provide a richer representation of planning problems and allows to better guide the plan search and provides more knowledge to the underlying algorithms. In this paper, we propose a new approach of HTN planning in which, as in conventional planning, we instantiate all planning operators before starting the search process. This approach has proven its effectiveness in classical planning and is necessary for the development of effective heuristics and encoding planning problems in other formalism such as CSP or SAT. The instantiation is actually used by most modern planners but has never been applied in an HTN based planning framework. We present in this article a generic instantiation algorithm which implements many simplification techniques to reduce the process complexity inspired from those used in classical planning. Finally we present some results obtained from an experimentation on a range of problems used in the international planning competitions with a modified version of SHOP planner using fully instantiated problems.
* in French, Journ\'ees Francophones de Planification de D\'ecision et d'Apprentissage, 2016
Une architecture cognitive et affective orient{é}e interaction
Oct 22, 2018
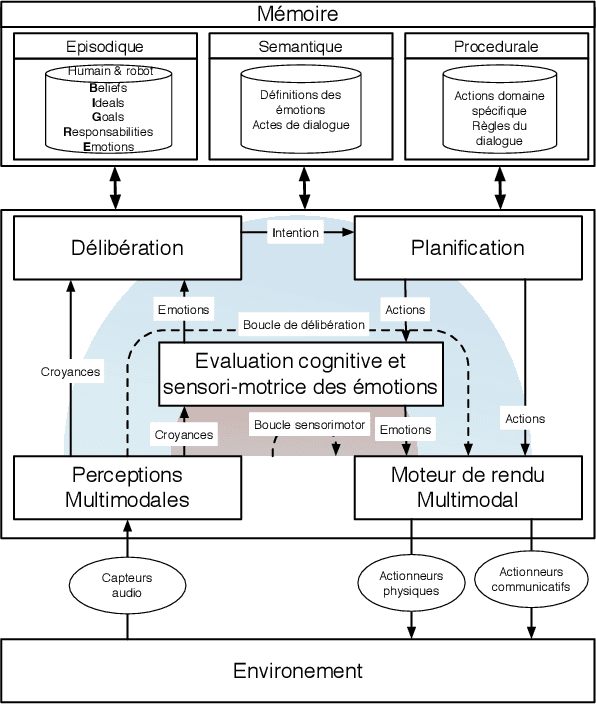
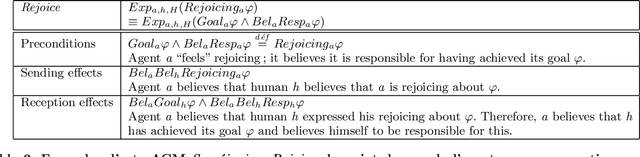
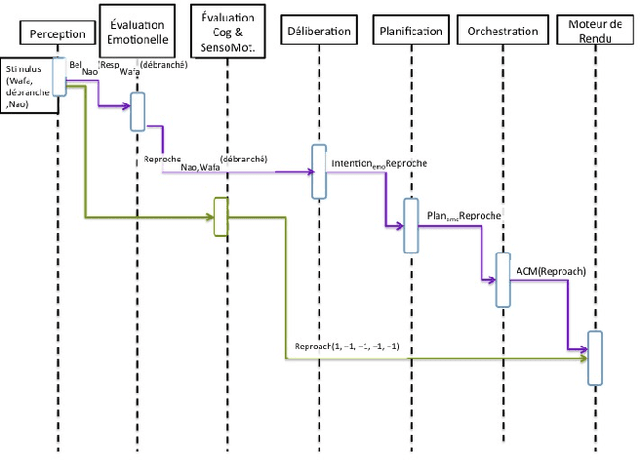
In this paper, we present CAIO, a Cognitive and Affective Interaction-Oriented architecture for social human-robot interactions (HRI), allowing robots to reason on mental states (including emotions), and to act physically, emotionally and verbally. We also present a short scenario and implementation on a Nao robot.
* in French
A Review on Learning Planning Action Models for Socio-Communicative HRI
Oct 22, 2018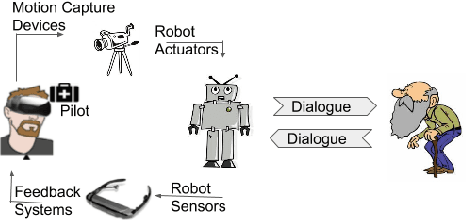
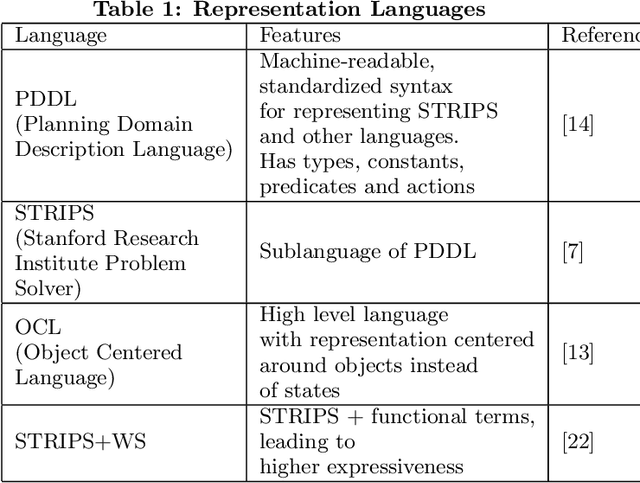
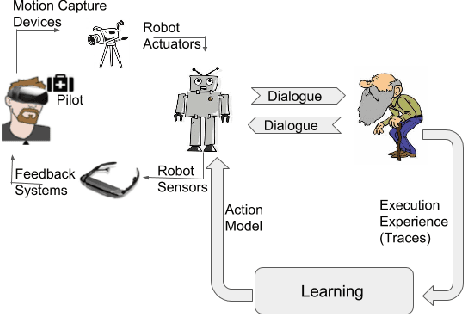
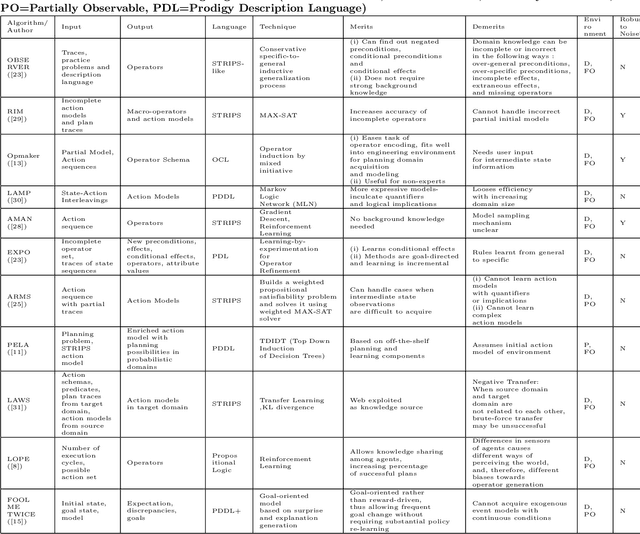
For social robots to be brought more into widespread use in the fields of companionship, care taking and domestic help, they must be capable of demonstrating social intelligence. In order to be acceptable, they must exhibit socio-communicative skills. Classic approaches to program HRI from observed human-human interactions fails to capture the subtlety of multimodal interactions as well as the key structural differences between robots and humans. The former arises due to a difficulty in quantifying and coding multimodal behaviours, while the latter due to a difference of the degrees of liberty between a robot and a human. However, the notion of reverse engineering from multimodal HRI traces to learn the underlying behavioral blueprint of the robot given multimodal traces seems an option worth exploring. With this spirit, the entire HRI can be seen as a sequence of exchanges of speech acts between the robot and human, each act treated as an action, bearing in mind that the entire sequence is goal-driven. Thus, this entire interaction can be treated as a sequence of actions propelling the interaction from its initial to goal state, also known as a plan in the domain of AI planning. In the same domain, this action sequence that stems from plan execution can be represented as a trace. AI techniques, such as machine learning, can be used to learn behavioral models (also known as symbolic action models in AI), intended to be reusable for AI planning, from the aforementioned multimodal traces. This article reviews recent machine learning techniques for learning planning action models which can be applied to the field of HRI with the intent of rendering robots as socio-communicative.
* Workshop on Affect, Artifcial Compagnon and Interaction, 2016
Mining useful Macro-actions in Planning
Oct 22, 2018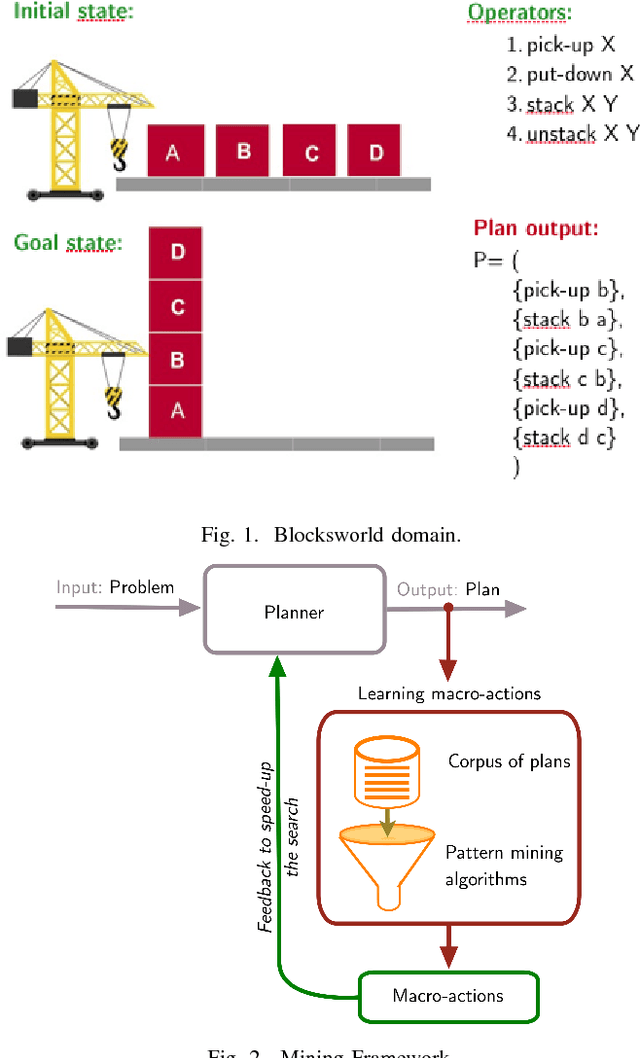
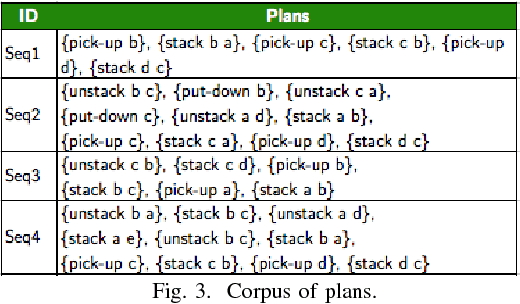
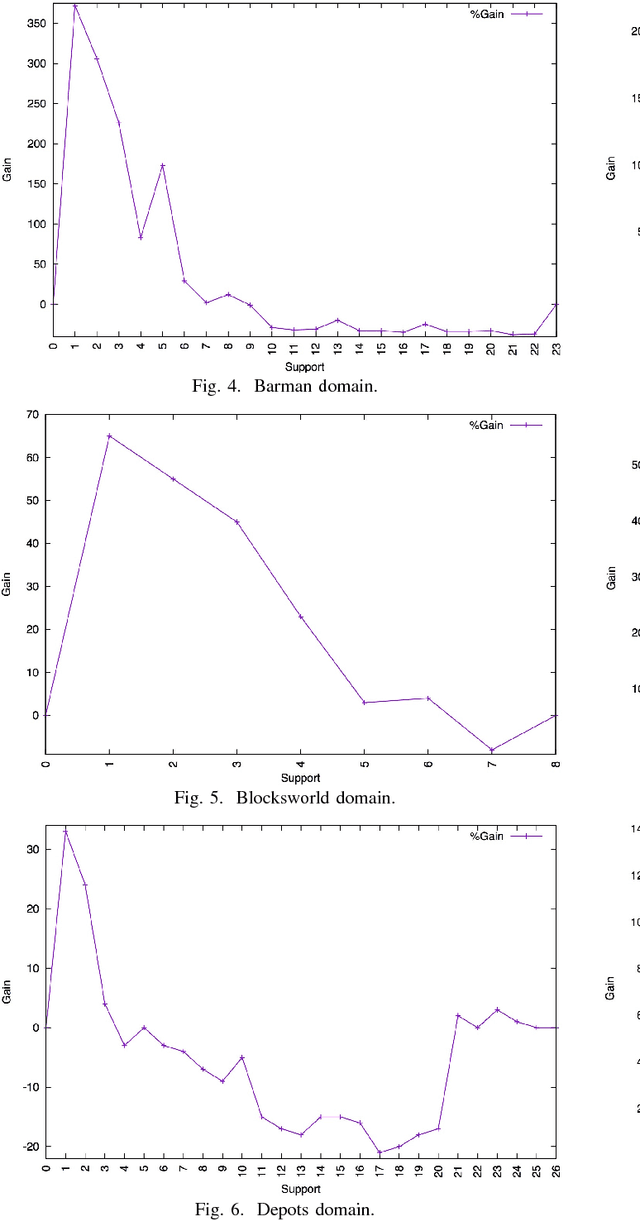
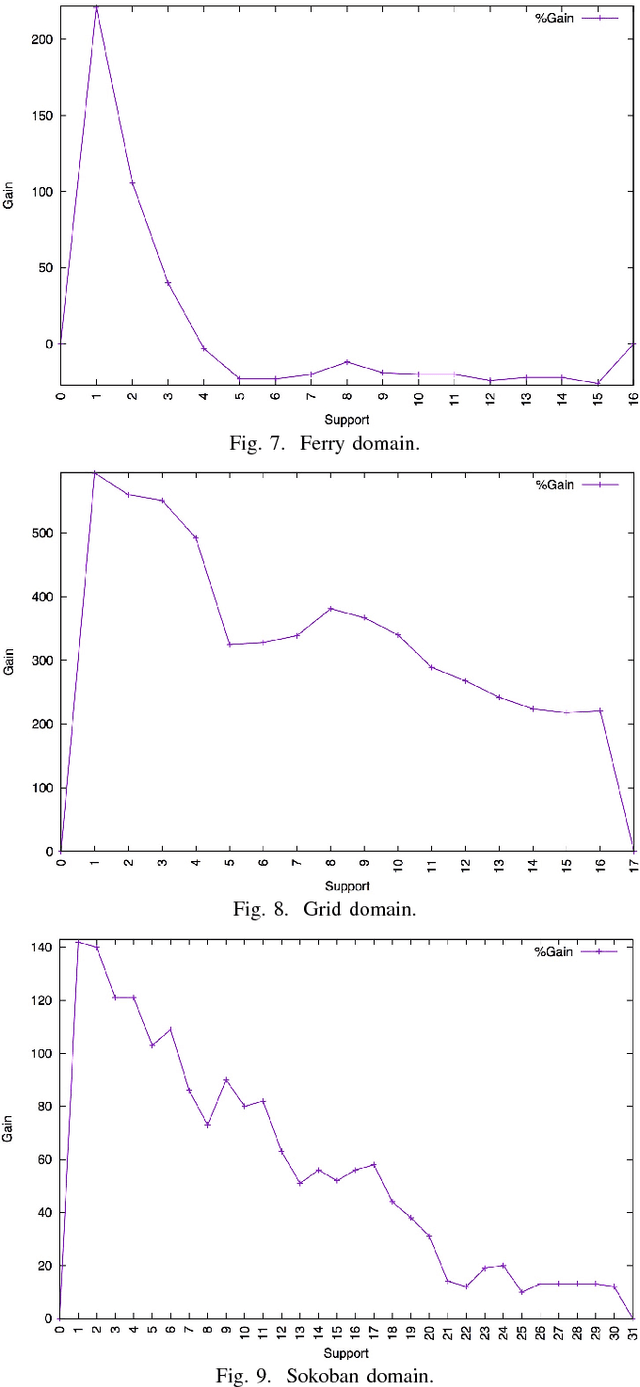
Planning has achieved significant progress in recent years. Among the various approaches to scale up plan synthesis, the use of macro-actions has been widely explored. As a first stage towards the development of a solution to learn on-line macro-actions, we propose an algorithm to identify useful macro-actions based on data mining techniques. The integration in the planning search of these learned macro-actions shows significant improvements over six classical planning benchmarks.
* International Conference on Artificial Intelligence and Pattern Recognition, 2016
A Framework for Robot Programming in Cobotic Environments: First user experiments
Oct 19, 2018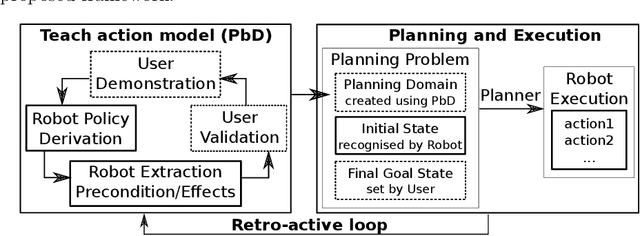
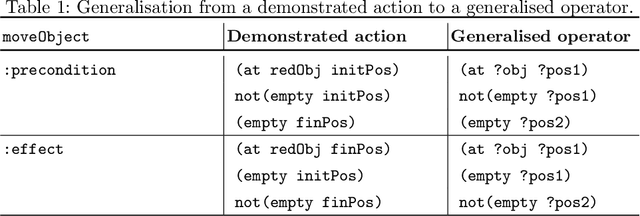
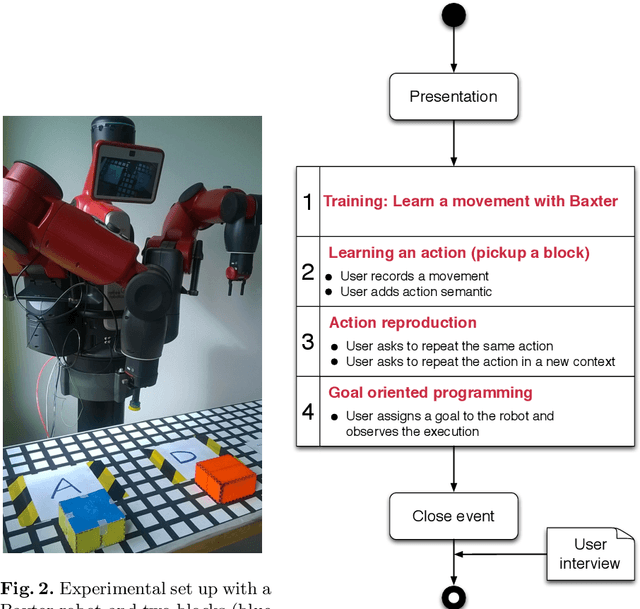
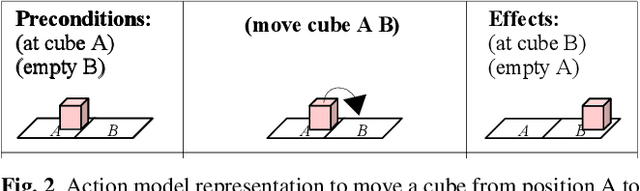
The increasing presence of robots in industries has not gone unnoticed. Large industrial players have incorporated them into their production lines, but smaller companies hesitate due to high initial costs and the lack of programming expertise. In this work we introduce a framework that combines two disciplines, Programming by Demonstration and Automated Planning, to allow users without any programming knowledge to program a robot. The user teaches the robot atomic actions together with their semantic meaning and represents them in terms of preconditions and effects. Using these atomic actions the robot can generate action sequences autonomously to reach any goal given by the user. We evaluated the usability of our framework in terms of user experiments with a Baxter Research Robot and showed that it is well-adapted to users without any programming experience.
Action Model Acquisition using LSTM
Oct 03, 2018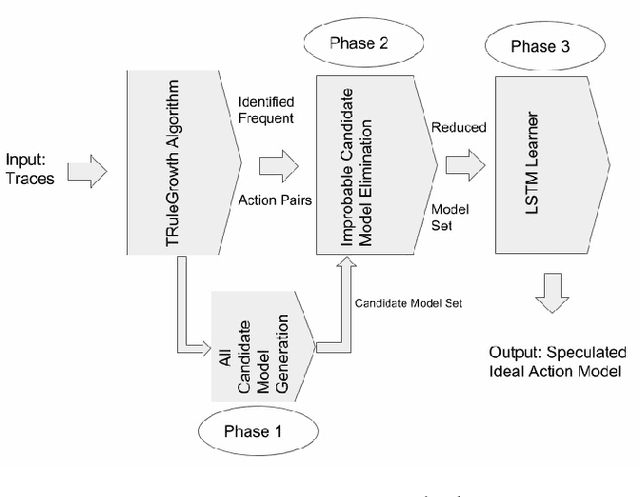
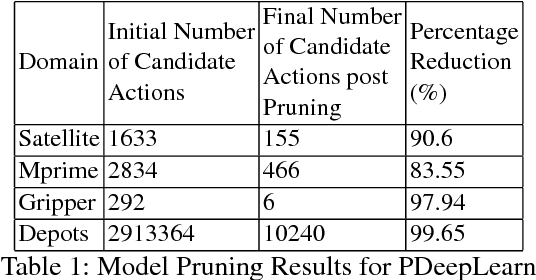
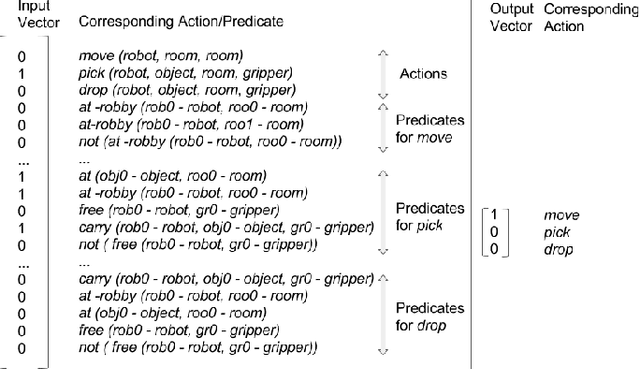
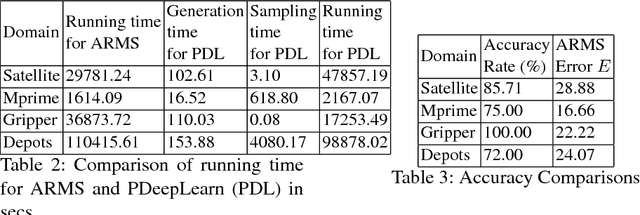
In the field of Automated Planning and Scheduling (APS), intelligent agents by virtue require an action model (blueprints of actions whose interleaved executions effectuates transitions of the system state) in order to plan and solve real world problems. It is, however, becoming increasingly cumbersome to codify this model, and is more efficient to learn it from observed plan execution sequences (training data). While the underlying objective is to subsequently plan from this learnt model, most approaches fall short as anything less than a flawless reconstruction of the underlying model renders it unusable in certain domains. This work presents a novel approach using long short-term memory (LSTM) techniques for the acquisition of the underlying action model. We use the sequence labelling capabilities of LSTMs to isolate from an exhaustive model set a model identical to the one responsible for producing the training data. This isolation capability renders our approach as an effective one.
Learning Macro-actions for State-Space Planning
Oct 07, 2016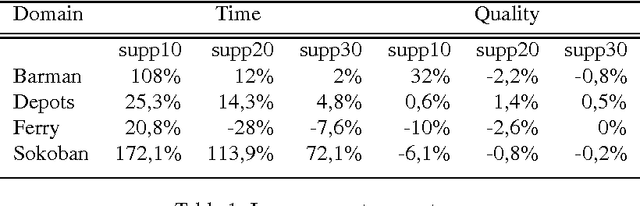
Planning has achieved significant progress in recent years. Among the various approaches to scale up plan synthesis, the use of macro-actions has been widely explored. As a first stage towards the development of a solution to learn on-line macro-actions, we propose an algorithm to identify useful macro-actions based on data mining techniques. The integration in the planning search of these learned macro-actions shows significant improvements over four classical planning benchmarks.