 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-driven visual monitoring of industrial assembly tasks
Jun 18, 2025Visual monitoring of industrial assembly tasks is critical for preventing equipment damage due to procedural errors and ensuring worker safety. Although commercial solutions exist, they typically require rigid workspace setups or the application of visual markers to simplify the problem. We introduce ViMAT, a novel AI-driven system for real-time visual monitoring of assembly tasks that operates without these constraints. ViMAT combines a perception module that extracts visual observations from multi-view video streams with a reasoning module that infers the most likely action being performed based on the observed assembly state and prior task knowledge. We validate ViMAT on two assembly tasks, involving the replacement of LEGO components and the reconfiguration of hydraulic press molds, demonstrating its effectiveness through quantitative and qualitative analysis in challenging real-world scenarios characterized by partial and uncertain visual observations. Project page: https://tev-fbk.github.io/ViMAT
Multi-view data capture using edge-synchronised mobiles
May 07, 2020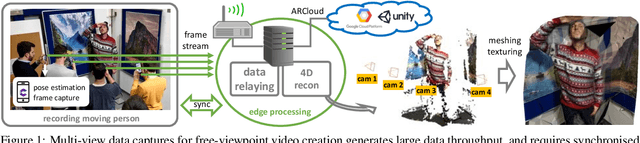
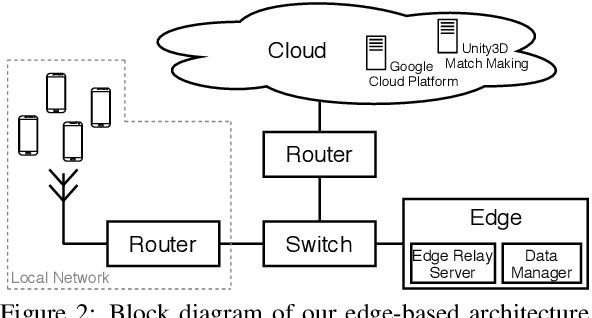
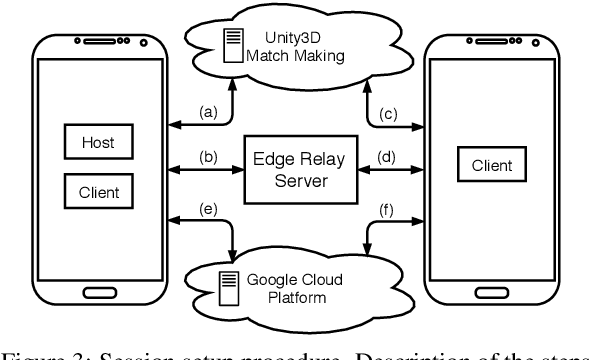
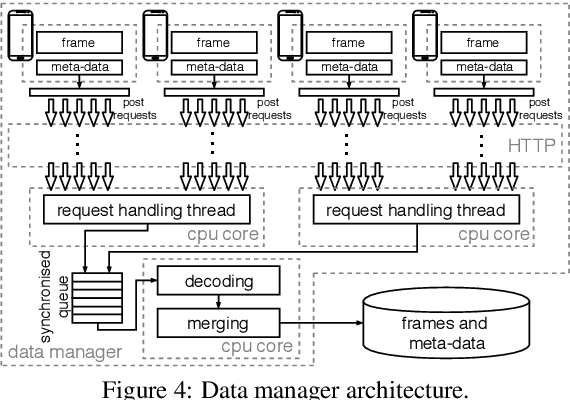
Multi-view data capture permits free-viewpoint video (FVV) content creation. To this end, several users must capture video streams, calibrated in both time and pose, framing the same object/scene, from different viewpoints. New-generation network architectures (e.g. 5G) promise lower latency and larger bandwidth connections supported by powerful edge computing, properties that seem ideal for reliable FVV capture. We have explored this possibility, aiming to remove the need for bespoke synchronisation hardware when capturing a scene from multiple viewpoints, making it possible through off-the-shelf mobiles. We propose a novel and scalable data capture architecture that exploits edge resources to synchronise and harvest frame captures. We have designed an edge computing unit that supervises the relaying of timing triggers to and from multiple mobiles, in addition to synchronising frame harvesting. We empirically show the benefits of our edge computing unit by analysing latencies and show the quality of 3D reconstruction outputs against an alternative and popular centralised solution based on Unity3D.