 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearn Faster and Forget Slower via Fast and Stable Task Adaptation
Jul 02, 2020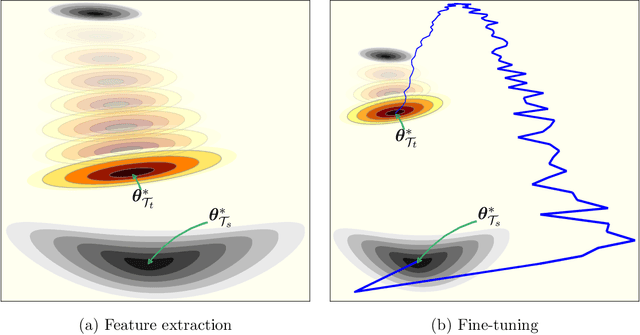
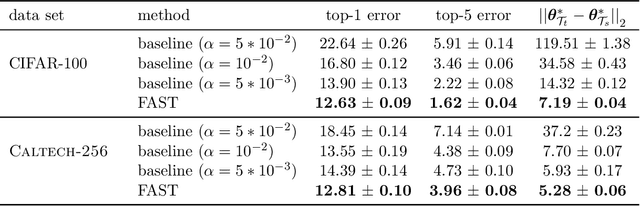
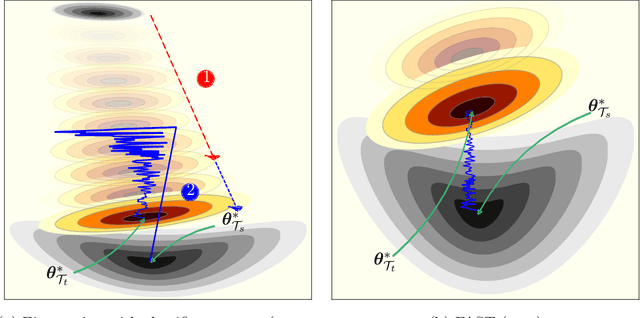
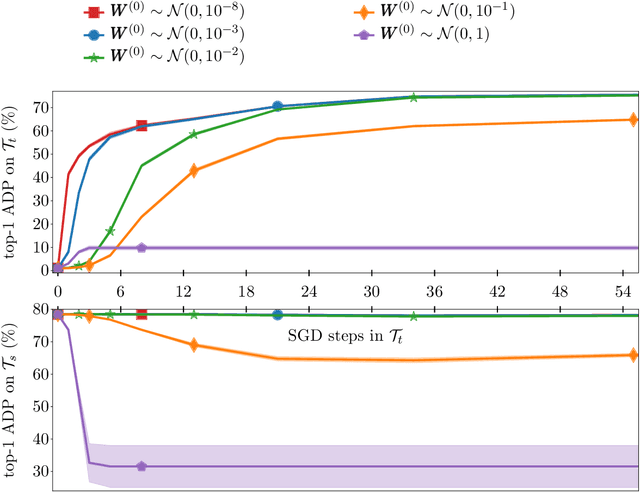
Training Deep Neural Networks (DNNs) is still highly time-consuming and compute-intensive. It has been shown that adapting a pretrained model may significantly accelerate this process. With a focus on classification, we show that current fine-tuning techniques make the pretrained models catastrophically forget the transferred knowledge even before anything about the new task is learned. Such rapid knowledge loss undermines the merits of transfer learning and may result in a much slower convergence rate compared to when the maximum amount of knowledge is exploited. We investigate the source of this problem from different perspectives and to alleviate it, introduce Fast And Stable Task-adaptation (FAST), an easy to apply fine-tuning algorithm. The paper provides a novel geometric perspective on how the loss landscape of source and target tasks are linked in different transfer learning strategies. We empirically show that compared to prevailing fine-tuning practices, FAST learns the target task faster and forgets the source task slower. The code is available at https://github.com/fvarno/FAST.
Analyzing the Impact of Foursquare and Streetlight Data with Human Demographics on Future Crime Prediction
Jun 13, 2020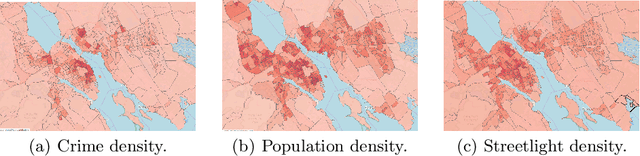
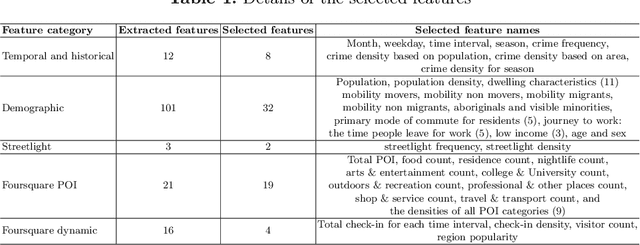
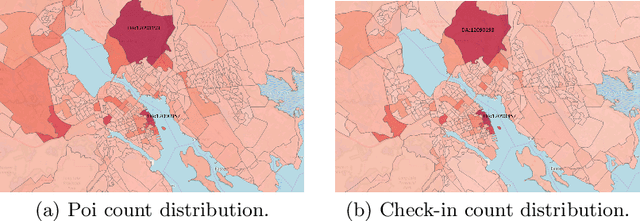
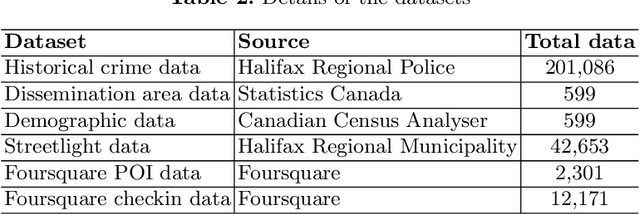
Finding the factors contributing to criminal activities and their consequences is essential to improve quantitative crime research. To respond to this concern, we examine an extensive set of features from different perspectives and explanations. Our study aims to build data-driven models for predicting future crime occurrences. In this paper, we propose the use of streetlight infrastructure and Foursquare data along with demographic characteristics for improving future crime incident prediction. We evaluate the classification performance based on various feature combinations as well as with the baseline model. Our proposed model was tested on each smallest geographic region in Halifax, Canada. Our findings demonstrate the effectiveness of integrating diverse sources of data to gain satisfactory classification performance.
Implicit Class-Conditioned Domain Alignment for Unsupervised Domain Adaptation
Jun 09, 2020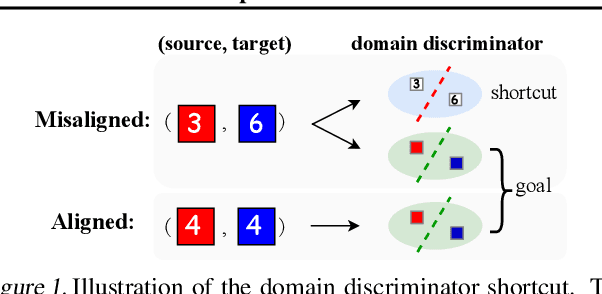
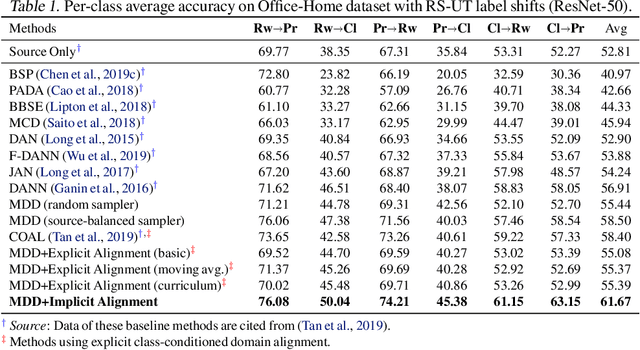
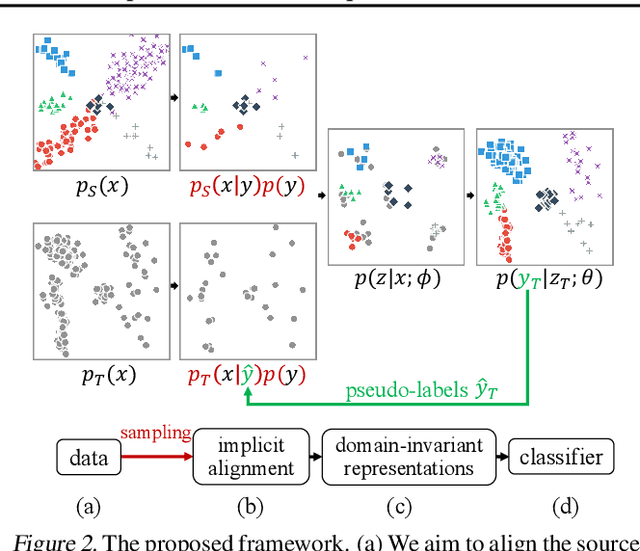
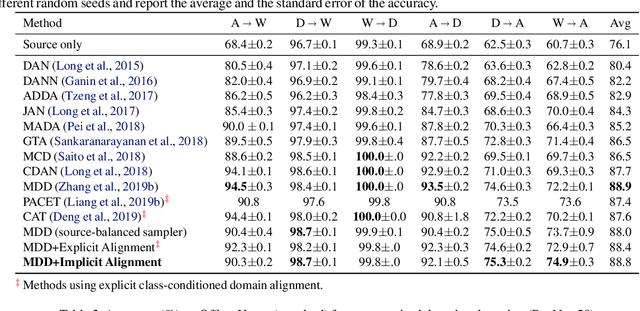
We present an approach for unsupervised domain adaptation---with a strong focus on practical considerations of within-domain class imbalance and between-domain class distribution shift---from a class-conditioned domain alignment perspective. Current methods for class-conditioned domain alignment aim to explicitly minimize a loss function based on pseudo-label estimations of the target domain. However, these methods suffer from pseudo-label bias in the form of error accumulation. We propose a method that removes the need for explicit optimization of model parameters from pseudo-labels directly. Instead, we present a sampling-based implicit alignment approach, where the sample selection procedure is implicitly guided by the pseudo-labels. Theoretical analysis reveals the existence of a domain-discriminator shortcut in misaligned classes, which is addressed by the proposed implicit alignment approach to facilitate domain-adversarial learning. Empirical results and ablation studies confirm the effectiveness of the proposed approach, especially in the presence of within-domain class imbalance and between-domain class distribution shift.
Challenges in Vessel Behavior and Anomaly Detection: From Classical Machine Learning to Deep Learning
Apr 07, 2020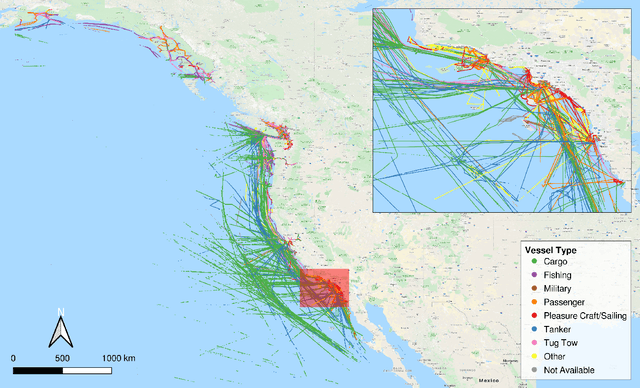
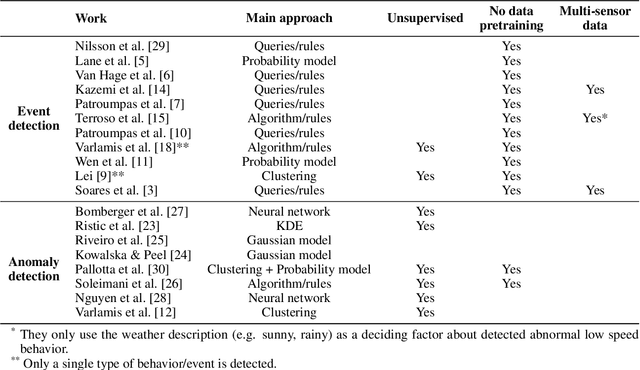
The global expansion of maritime activities and the development of the Automatic Identification System (AIS) have driven the advances in maritime monitoring systems in the last decade. Monitoring vessel behavior is fundamental to safeguard maritime operations, protecting other vessels sailing the ocean and the marine fauna and flora. Given the enormous volume of vessel data continually being generated, real-time analysis of vessel behaviors is only possible because of decision support systems provided with event and anomaly detection methods. However, current works on vessel event detection are ad-hoc methods able to handle only a single or a few predefined types of vessel behavior. Most of the existing approaches do not learn from the data and require the definition of queries and rules for describing each behavior. In this paper, we discuss challenges and opportunities in classical machine learning and deep learning for vessel event and anomaly detection. We hope to motivate the research of novel methods and tools, since addressing these challenges is an essential step towards actual intelligent maritime monitoring systems.
Using Deep Reinforcement Learning Methods for Autonomous Vessels in 2D Environments
Mar 23, 2020
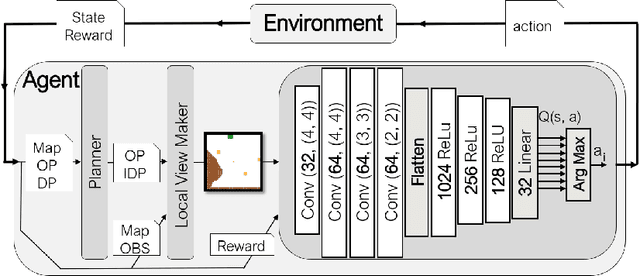
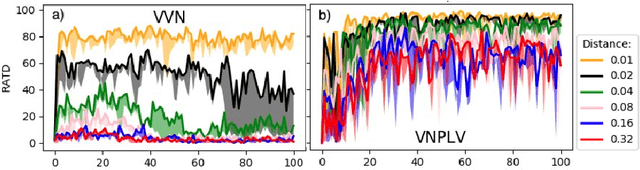
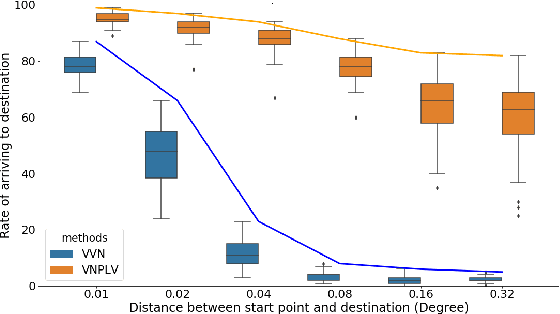
Unmanned Surface Vehicles technology (USVs) is an exciting topic that essentially deploys an algorithm to safely and efficiently performs a mission. Although reinforcement learning is a well-known approach to modeling such a task, instability and divergence may occur when combining off-policy and function approximation. In this work, we used deep reinforcement learning combining Q-learning with a neural representation to avoid instability. Our methodology uses deep q-learning and combines it with a rolling wave planning approach on agile methodology. Our method contains two critical parts in order to perform missions in an unknown environment. The first is a path planner that is responsible for generating a potential effective path to a destination without considering the details of the root. The latter is a decision-making module that is responsible for short-term decisions on avoiding obstacles during the near future steps of USV exploitation within the context of the value function. Simulations were performed using two algorithms: a basic vanilla vessel navigator (VVN) as a baseline and an improved one for the vessel navigator with a planner and local view (VNPLV). Experimental results show that the proposed method enhanced the performance of VVN by 55.31 on average for long-distance missions. Our model successfully demonstrated obstacle avoidance by means of deep reinforcement learning using planning adaptive paths in unknown environments.
Wise Sliding Window Segmentation: A classification-aided approach for trajectory segmentation
Mar 23, 2020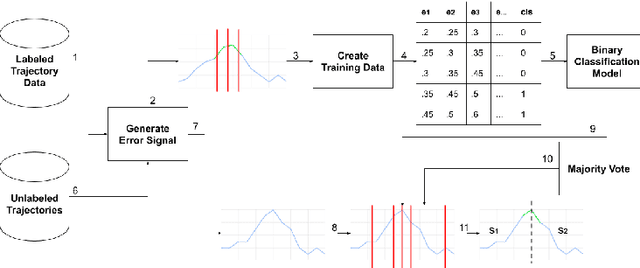
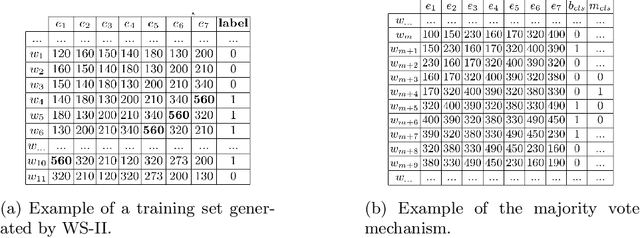
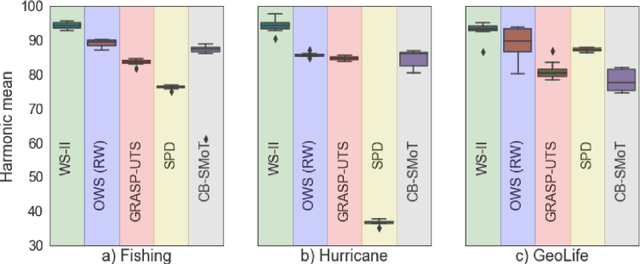
Large amounts of mobility data are being generated from many different sources, and several data mining methods have been proposed for this data. One of the most critical steps for trajectory data mining is segmentation. This task can be seen as a pre-processing step in which a trajectory is divided into several meaningful consecutive sub-sequences. This process is necessary because trajectory patterns may not hold in the entire trajectory but on trajectory parts. In this work, we propose a supervised trajectory segmentation algorithm, called Wise Sliding Window Segmentation (WS-II). It processes the trajectory coordinates to find behavioral changes in space and time, generating an error signal that is further used to train a binary classifier for segmenting trajectory data. This algorithm is flexible and can be used in different domains. We evaluate our method over three real datasets from different domains (meteorology, fishing, and individuals movements), and compare it with four other trajectory segmentation algorithms: OWS, GRASP-UTS, CB-SMoT, and SPD. We observed that the proposed algorithm achieves the highest performance for all datasets with statistically significant differences in terms of the harmonic mean of purity and coverage.
Performance of a Deep Neural Network at Detecting North Atlantic Right Whale Upcalls
Feb 29, 2020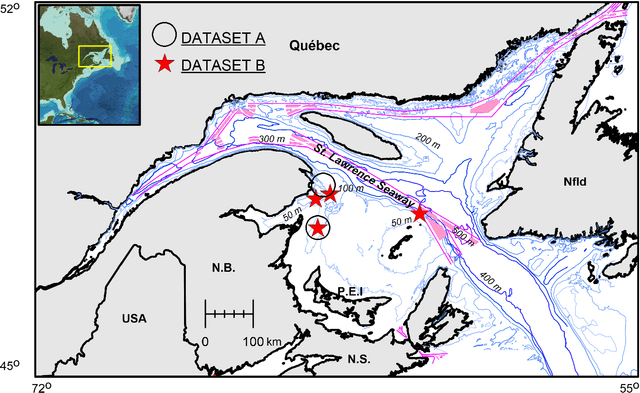
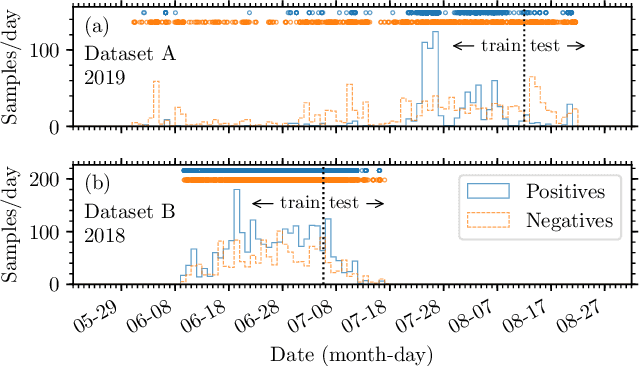
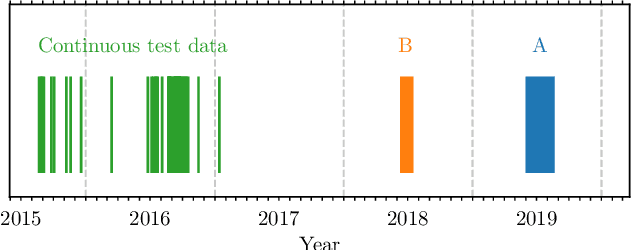
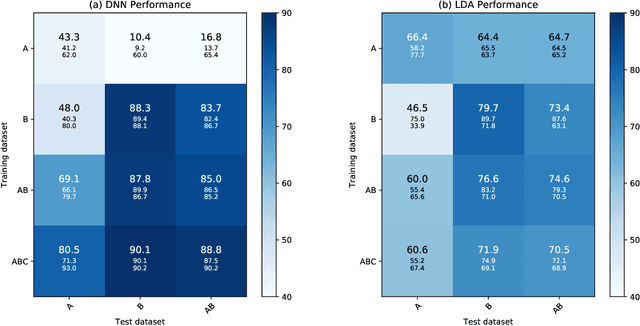
Passive acoustics provides a powerful tool for monitoring the endangered North Atlantic right whale ($Eubalaena$ $glacialis$), but robust detection algorithms are needed to handle diverse and variable acoustic conditions and differences in recording techniques and equipment. Here, we investigate the potential of deep neural networks for addressing this need. ResNet, an architecture commonly used for image recognition, is trained to recognize the time-frequency representation of the characteristic North Atlantic right whale upcall. The network is trained on several thousand examples recorded at various locations in the Gulf of St.\ Lawrence in 2018 and 2019, using different equipment and deployment techniques. Used as a detection algorithm on fifty 30-minute recordings from the years 2015-2017 containing over one thousand upcalls, the network achieves recalls up to 80%, while maintaining a precision of 90%. Importantly, the performance of the network improves as more variance is introduced into the training dataset, whereas the opposite trend is observed using a conventional linear discriminant analysis approach. Our work demonstrates that deep neural networks can be trained to identify North Atlantic right whale upcalls under diverse and variable conditions with a performance that compares favorably to that of existing algorithms.
Black Box Explanation by Learning Image Exemplars in the Latent Feature Space
Jan 27, 2020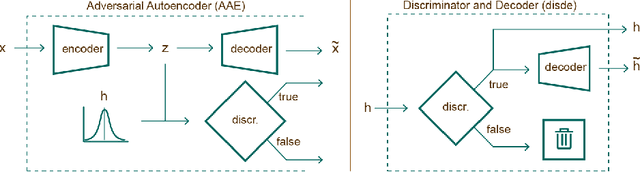
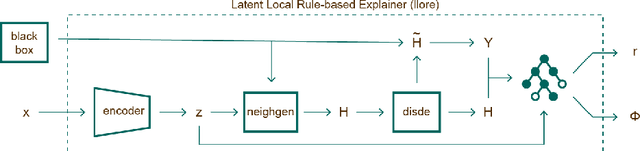

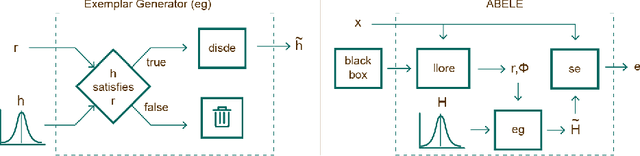
We present an approach to explain the decisions of black box models for image classification. While using the black box to label images, our explanation method exploits the latent feature space learned through an adversarial autoencoder. The proposed method first generates exemplar images in the latent feature space and learns a decision tree classifier. Then, it selects and decodes exemplars respecting local decision rules. Finally, it visualizes them in a manner that shows to the user how the exemplars can be modified to either stay within their class, or to become counter-factuals by "morphing" into another class. Since we focus on black box decision systems for image classification, the explanation obtained from the exemplars also provides a saliency map highlighting the areas of the image that contribute to its classification, and areas of the image that push it into another class. We present the results of an experimental evaluation on three datasets and two black box models. Besides providing the most useful and interpretable explanations, we show that the proposed method outperforms existing explainers in terms of fidelity, relevance, coherence, and stability.
Multimodal Deep Learning for Mental Disorders Prediction from Audio Speech Samples
Sep 12, 2019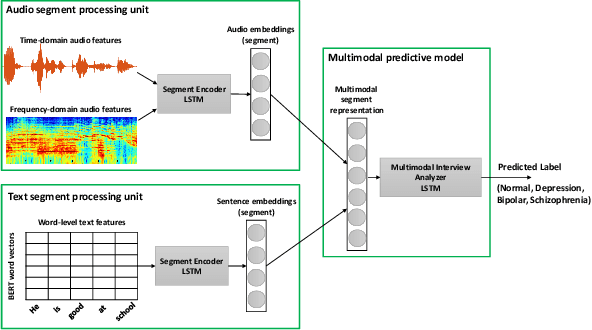
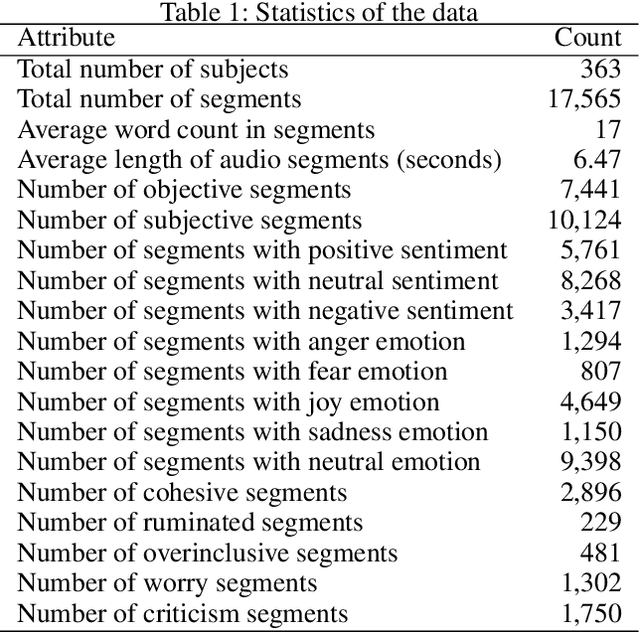
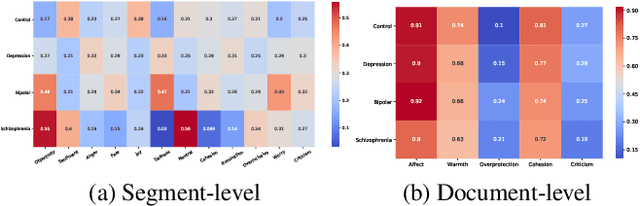
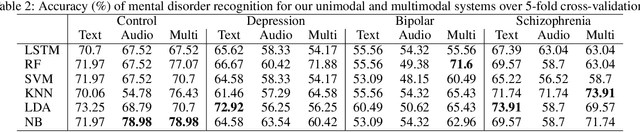
Key features of mental illnesses are reflected in speech. Our research focuses on designing a multimodal deep learning structure that automatically extracts salient features from recorded speech samples for predicting various mental disorders including depression, bipolar, and schizophrenia. We adopt a variety of pre-trained models to extract embeddings from both audio and text segments. We use several state-of-the-art embedding techniques including BERT, FastText, and Doc2VecC for the text representation learning and WaveNet and VGG-ish models for audio encoding. We also leverage huge auxiliary emotion-labeled text and audio corpora to train emotion-specific embeddings and use transfer learning in order to address the problem of insufficient annotated multimodal data available. All these embeddings are then combined into a joint representation in a multimodal fusion layer and finally a recurrent neural network is used to predict the mental disorder. Our results show that mental disorders can be predicted with acceptable accuracy through multimodal analysis of clinical interviews.
Unsupervised Behavior Change Detection in Multidimensional Data Streams for Maritime Traffic Monitoring
Aug 14, 2019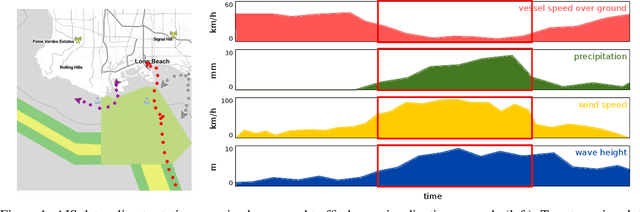
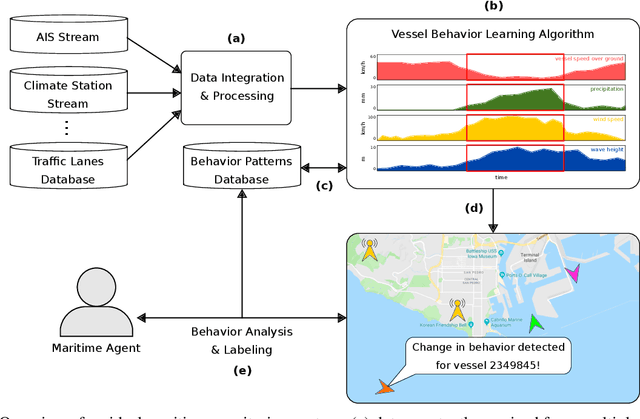
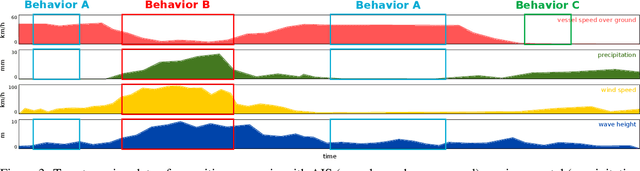
The worldwide growth of maritime traffic and the development of the Automatic Identification System (AIS) has led to advances in monitoring systems for preventing vessel accidents and detecting illegal activities. In this work, we describe research gaps and challenges in machine learning for vessel behavior change and event detection, considering several constraints imposed by real-time data streams and the maritime monitoring domain. As a starting point, we investigate how unsupervised and semi-supervised change detection methods may be employed for identifying shifts in vessel behavior, aiming to detect and label unusual events.