 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWriter Independent Offline Signature Recognition Using Ensemble Learning
Jan 19, 2019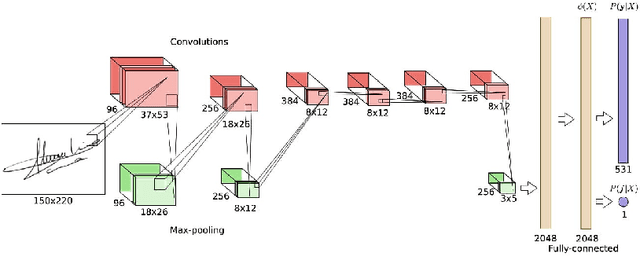
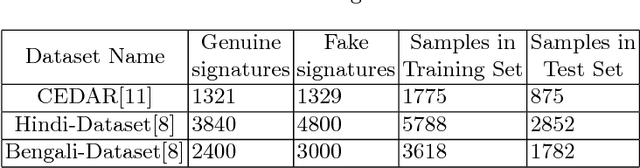
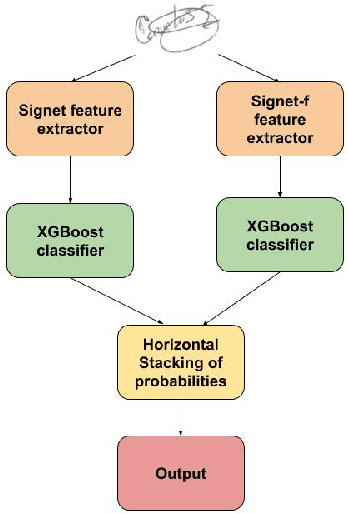
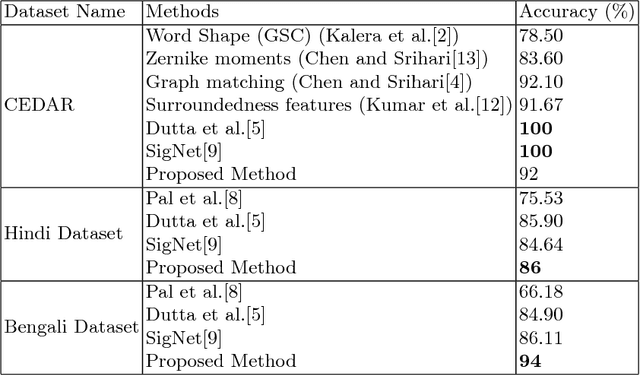
The area of Handwritten Signature Verification has been broadly researched in the last decades, but remains an open research problem. In offline (static) signature verification, the dynamic information of the signature writing process is lost, and it is difficult to design good feature extractors that can distinguish genuine signatures and skilled forgeries. This verification task is even harder in writer independent scenarios which is undeniably fiscal for realistic cases. In this paper, we have proposed an Ensemble model for offline writer, independent signature verification task with Deep learning. We have used two CNNs for feature extraction, after that RGBT for classification & Stacking to generate final prediction vector. We have done extensive experiments on various datasets from various sources to maintain a variance in the dataset. We have achieved the state of the art performance on various datasets.
Bird Species Classification using Transfer Learning with Multistage Training
Oct 11, 2018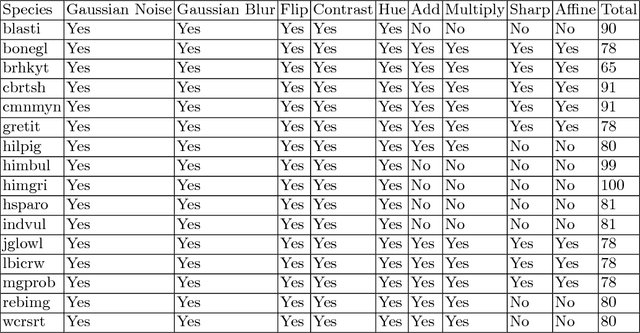

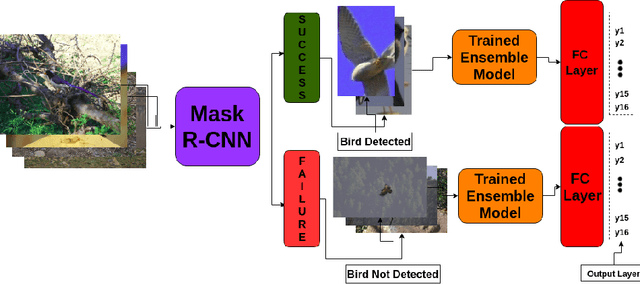
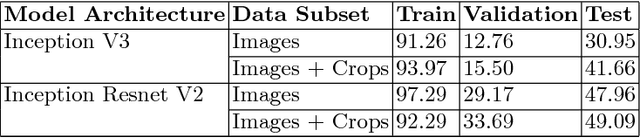
Bird species classification has received more and more attention in the field of computer vision, for its promising applications in biology and environmental studies. Recognizing bird species is difficult due to the challenges of discriminative region localization and fine-grained feature learning. In this paper, we have introduced a Transfer learning based method with multistage training. We have used both Pre-Trained Mask-RCNN and an ensemble model consisting of Inception Nets (InceptionV3 & InceptionResNetV2 ) to get localization and species of the bird from the images respectively. Our final model achieves an F1 score of 0.5567 or 55.67 % on the dataset provided in CVIP 2018 Challenge.
Language Identification of Bengali-English Code-Mixed data using Character & Phonetic based LSTM Models
Jun 27, 2018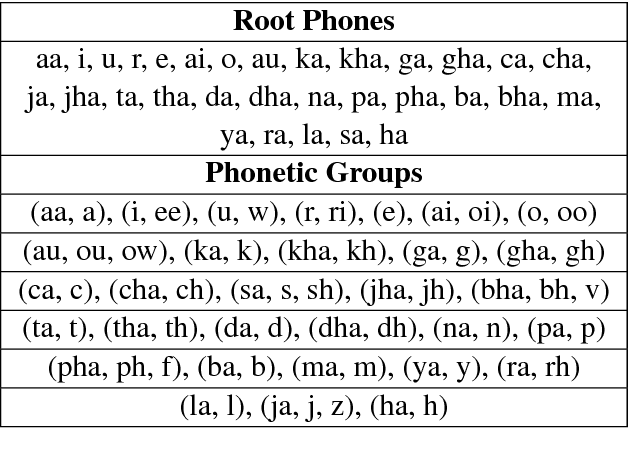
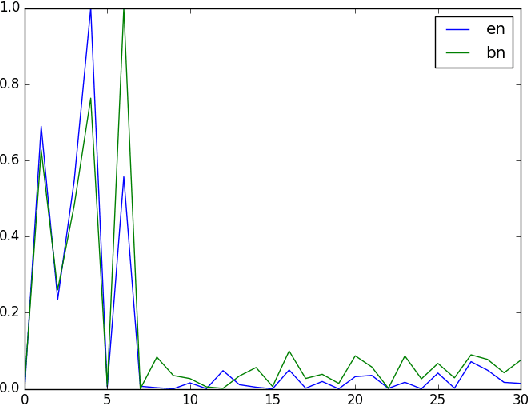
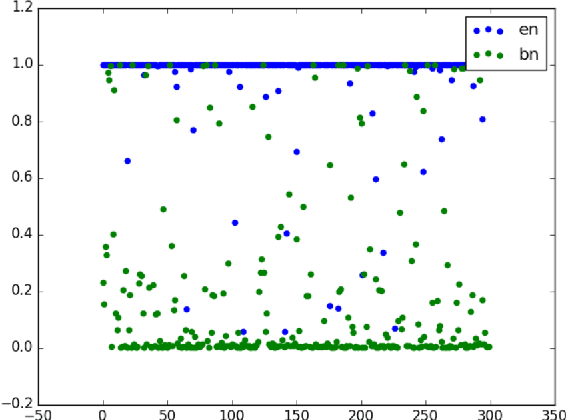
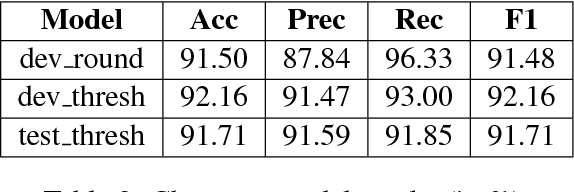
Language identification of social media text still remains a challenging task due to properties like code-mixing and inconsistent phonetic transliterations. In this paper, we present a supervised learning approach for language identification at the word level of low resource Bengali-English code-mixed data taken from social media. We employ two methods of word encoding, namely character based and root phone based to train our deep LSTM models. Utilizing these two models we created two ensemble models using stacking and threshold technique which gave 91.78% and 92.35% accuracies respectively on our testing data.
Energy Optimized Robot Arm Path Planning using Differential Evolution in Dynamic Environment
Jun 23, 2018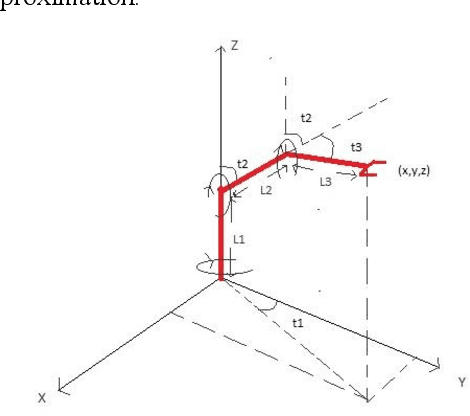
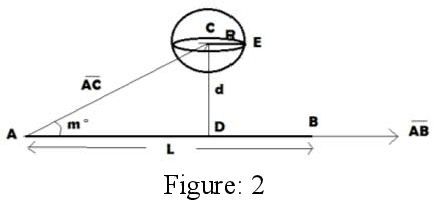
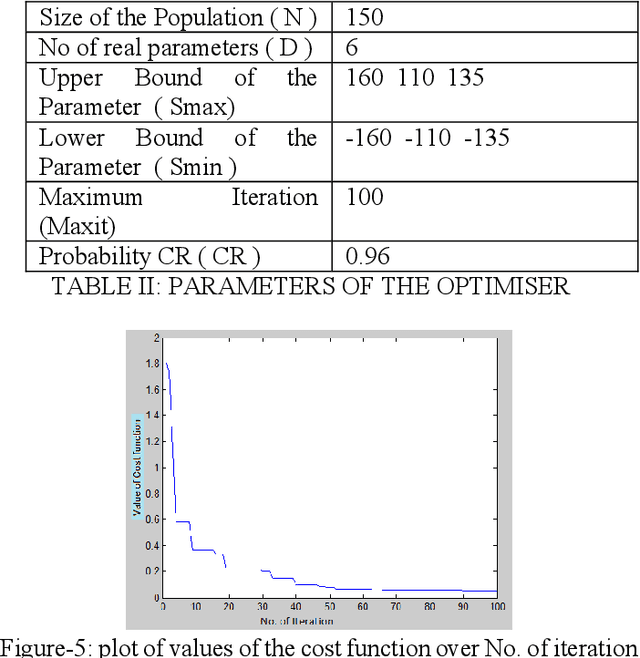
Robots are widely used in industry due to their efficiency and high accuracy in performance. One of the most intriguing issues in manufacturing stage of production line is to minimize significantly high percentage of energy consumed by these robot manipulators. The energy optimal control of robotic manipulators is a complex problem, as it requires a deep understanding of the robot's kinematics and dynamic behaviors. This paper propose a novel method of energy efficient path planning of an industrial robot arm in a workspace with multiple obstacles using differential evolution (DE) algorithm. The path-planning problem is formulated as an optimization problem with an aim to determine the shortest and energy optimal path of the robot arm from its given initial position to the predefined goal location, without hitting obstacles. Application of such evolutionary algorithms in trajectory planning is advantageous because the exact solution to the path-planning problem is not always available beforehand and must be determined dynamically. Experiments undertaken reveal that the DE-based path-planning algorithm outperforms its contenders in a significant manner.