 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSituating AI Agents in their World: Aspective Agentic AI for Dynamic Partially Observable Information Systems
Sep 03, 2025Agentic LLM AI agents are often little more than autonomous chatbots: actors following scripts, often controlled by an unreliable director. This work introduces a bottom-up framework that situates AI agents in their environment, with all behaviors triggered by changes in their environments. It introduces the notion of aspects, similar to the idea of umwelt, where sets of agents perceive their environment differently to each other, enabling clearer control of information. We provide an illustrative implementation and show that compared to a typical architecture, which leaks up to 83% of the time, aspective agentic AI enables zero information leakage. We anticipate that this concept of specialist agents working efficiently in their own information niches can provide improvements to both security and efficiency.
* 9 pages
CLEAR: Cue Learning using Evolution for Accurate Recognition Applied to Sustainability Data Extraction
Jan 30, 2025



Large Language Model (LLM) image recognition is a powerful tool for extracting data from images, but accuracy depends on providing sufficient cues in the prompt - requiring a domain expert for specialized tasks. We introduce Cue Learning using Evolution for Accurate Recognition (CLEAR), which uses a combination of LLMs and evolutionary computation to generate and optimize cues such that recognition of specialized features in images is improved. It achieves this by auto-generating a novel domain-specific representation and then using it to optimize suitable textual cues with a genetic algorithm. We apply CLEAR to the real-world task of identifying sustainability data from interior and exterior images of buildings. We investigate the effects of using a variable-length representation compared to fixed-length and show how LLM consistency can be improved by refactoring from categorical to real-valued estimates. We show that CLEAR enables higher accuracy compared to expert human recognition and human-authored prompts in every task with error rates improved by up to two orders of magnitude and an ablation study evincing solution concision.
Automated Real-World Sustainability Data Generation from Images of Buildings
May 28, 2024



When data on building features is unavailable, the task of determining how to improve that building in terms of carbon emissions becomes infeasible. We show that from only a set of images, a Large Language Model with appropriate prompt engineering and domain knowledge can successfully estimate a range of building features relevant for sustainability calculations. We compare our novel image-to-data method with a ground truth comprising real building data for 47 apartments and achieve accuracy better than a human performing the same task. We also demonstrate that the method can generate tailored recommendations to the owner on how best to improve their properties and discuss methods to scale the approach.
Address-Specific Sustainable Accommodation Choice Through Real-World Data Integration
May 21, 2024



Consumers wish to choose sustainable accommodation for their travels, and in the case of corporations, may be required to do so. Yet accommodation marketplaces provide no meaningful capability for sustainable choice: typically CO2 estimates are provided that are identical for all accommodation of the same type across an entire country. We propose a decision support system that enables real choice of sustainable accommodation. We develop a data-driven address-specific metric called EcoGrade, which integrates government approved datasets and uses interpolation where data is sparse. We validate the metric on 10,000 UK addresses in 10 cities, showing the match of our interpolations to reality is statistically significant. We show how the metric has been embedded into a decision support system for a global accommodation marketplace and tested by real users over several months with positive user feedback. In the EU, forty percent of final energy consumption is from buildings. We need to encourage all building owners to make their accommodation more efficient. The rental sector is one area where change can occur rapidly, as rented accommodation is renovated frequently. We anticipate our decision support system using EcoGrade will encourage this positive change.
SCAPE: Searching Conceptual Architecture Prompts using Evolution
Jan 31, 2024Conceptual architecture involves a highly creative exploration of novel ideas, often taken from other disciplines as architects consider radical new forms, materials, textures and colors for buildings. While today's generative AI systems can produce remarkable results, they lack the creativity demonstrated for decades by evolutionary algorithms. SCAPE, our proposed tool, combines evolutionary search with generative AI, enabling users to explore creative and good quality designs inspired by their initial input through a simple point and click interface. SCAPE injects randomness into generative AI, and enables memory, making use of the built-in language skills of GPT-4 to vary prompts via text-based mutation and crossover. We demonstrate that compared to DALL-E 3, SCAPE enables a 67% improvement in image novelty, plus improvements in quality and effectiveness of use; we show that in just 3 iterations SCAPE has a 24% image novelty increase enabling effective exploration, plus optimization of images by users. We use more than 20 independent architects to assess SCAPE, who provide markedly positive feedback.
Using a Variational Autoencoder to Learn Valid Search Spaces of Safely Monitored Autonomous Robots for Last-Mile Delivery
Mar 06, 2023



The use of autonomous robots for delivery of goods to customers is an exciting new way to provide a reliable and sustainable service. However, in the real world, autonomous robots still require human supervision for safety reasons. We tackle the realworld problem of optimizing autonomous robot timings to maximize deliveries, while ensuring that there are never too many robots running simultaneously so that they can be monitored safely. We assess the use of a recent hybrid machine-learningoptimization approach COIL (constrained optimization in learned latent space) and compare it with a baseline genetic algorithm for the purposes of exploring variations of this problem. We also investigate new methods for improving the speed and efficiency of COIL. We show that only COIL can find valid solutions where appropriate numbers of robots run simultaneously for all problem variations tested. We also show that when COIL has learned its latent representation, it can optimize 10% faster than the GA, making it a good choice for daily re-optimization of robots where delivery requests for each day are allocated to robots while maintaining safe numbers of robots running at once.
The Agent-based Modelling for Human Behaviour Special Issue
Feb 06, 2023If human societies are so complex, then how can we hope to understand them? Artificial Life gives us one answer. The field of Artificial Life comprises a diverse set of introspective studies that largely ask the same questions, albeit from many different perspectives: Why are we here? Who are we? Why do we behave as we do? Starting with the origins of life provides us with fascinating answers to some of these questions. However, some researchers choose to bring their studies closer to the present day. We are after all, human. It has been a few billion years since our ancestors were self-replicating molecules. Thus, more direct studies of ourselves and our human societies can reveal truths that may lead to practical knowledge. The papers in this special issue bring together scientists who choose to perform this kind of research.
* extended version with references
Kill Chaos with Kindness: Agreeableness Improves Team Performance Under Uncertainty
Aug 09, 2022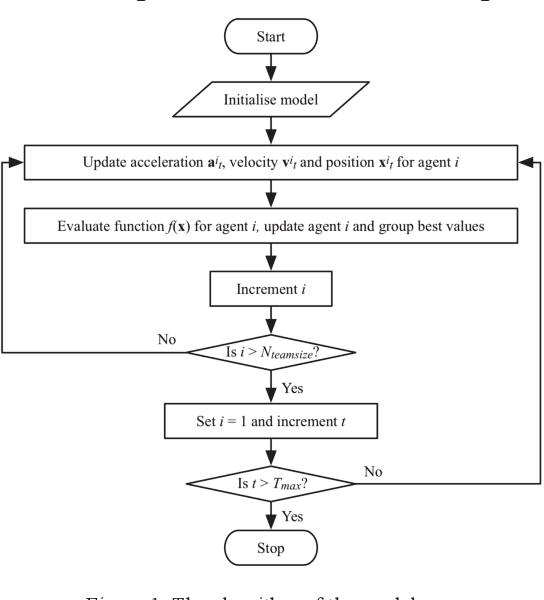
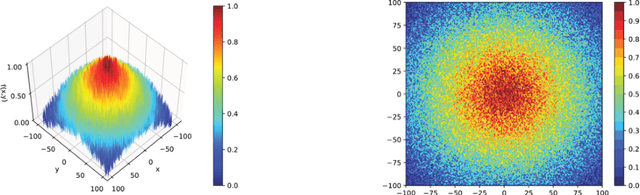
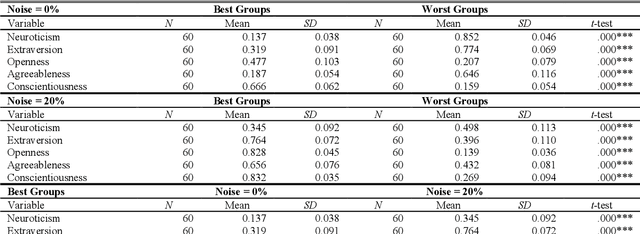
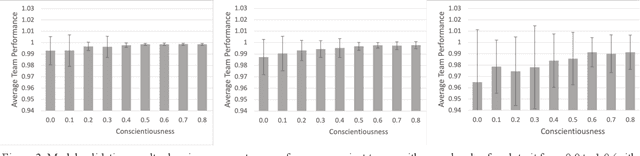
Teams are central to human accomplishment. Over the past half-century, psychologists have identified the Big-Five cross-culturally valid personality variables: Neuroticism, Extraversion, Openness, Conscientiousness, and Agreeableness. The first four have shown consistent relationships with team performance. Agreeableness (being harmonious, altruistic, humble, and cooperative), however, has demonstrated a non-significant and highly variable relationship with team performance. We resolve this inconsistency through computational modelling. An agent-based model (ABM) is used to predict the effects of personality traits on teamwork and a genetic algorithm is then used to explore the limits of the ABM in order to discover which traits correlate with best and worst performing teams for a problem with different levels of uncertainty (noise). New dependencies revealed by the exploration are corroborated by analyzing previously-unseen data from one the largest datasets on team performance to date comprising 3,698 individuals in 593 teams working on more than 5,000 group tasks with and without uncertainty, collected over a 10-year period. Our finding is that the dependency between team performance and Agreeableness is moderated by task uncertainty. Combining evolutionary computation with ABMs in this way provides a new methodology for the scientific investigation of teamwork, making new predictions, and improving our understanding of human behaviors. Our results confirm the potential usefulness of computer modelling for developing theory, as well as shedding light on the future of teams as work environments are becoming increasingly fluid and uncertain.
COIL: Constrained Optimization in Learned Latent Space -- Learning Representations for Valid Solutions
Feb 07, 2022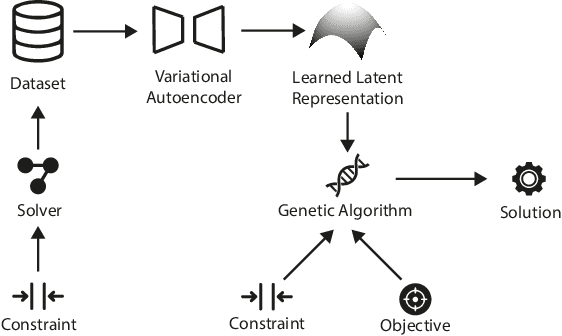
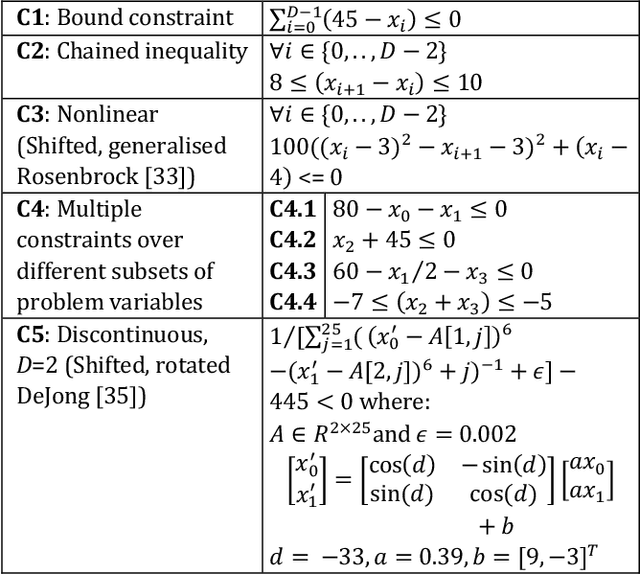
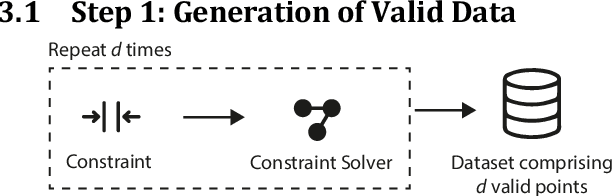
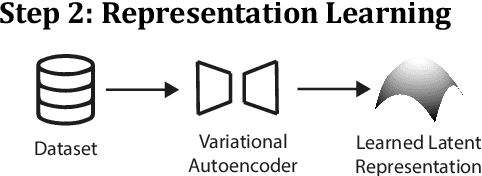
Constrained optimization problems can be difficult because their search spaces have properties not conducive to search, e.g., multimodality, discontinuities, or deception. To address such difficulties, considerable research has been performed on creating novel evolutionary algorithms or specialized genetic operators. However, if the representation that defined the search space could be altered such that it only permitted valid solutions that satisfied the constraints, the task of finding the optimal would be made more feasible without any need for specialized optimization algorithms. We propose the use of a Variational Autoencoder to learn such representations. We present Constrained Optimization in Latent Space (COIL), which uses a VAE to generate a learned latent representation from a dataset comprising samples from the valid region of the search space according to a constraint, thus enabling the optimizer to find the objective in the new space defined by the learned representation. We investigate the value of this approach on different constraint types and for different numbers of variables. We show that, compared to an identical GA using a standard representation, COIL with its learned latent representation can satisfy constraints and find solutions with distance to objective up to two orders of magnitude closer.