 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta-ROS: A Next-Generation Middleware Architecture for Adaptive and Scalable Robotic Systems
Jan 28, 2026The field of robotics faces significant challenges related to the complexity and interoperability of existing middleware frameworks, like ROS2, which can be difficult for new developers to adopt. To address these issues, we propose Meta-ROS, a novel middleware solution designed to streamline robotics development by simplifying integration, enhancing performance, and ensuring cross-platform compatibility. Meta-ROS leverages modern communication protocols, such as Zenoh and ZeroMQ, to enable efficient and low-latency communication across diverse hardware platforms, while also supporting various data types like audio, images, and video. We evaluated Meta-ROS's performance through comprehensive testing, comparing it with existing middleware frameworks like ROS1 and ROS2. The results demonstrated that Meta-ROS outperforms ROS2, achieving up to 30% higher throughput, significantly reducing message latency, and optimizing resource usage. Additionally, its robust hardware support and developer-centric design facilitate seamless integration and ease of use, positioning Meta-ROS as an ideal solution for modern, real-time robotics AI applications.
DP-EMAR: A Differentially Private Framework for Autonomous Model Weight Repair in Federated IoT Systems
Dec 15, 2025Federated Learning (FL) enables decentralized model training without sharing raw data, but model weight distortion remains a major challenge in resource constrained IoT networks. In multi tier Federated IoT (Fed-IoT) systems, unstable connectivity and adversarial interference can silently alter transmitted parameters, degrading convergence. We propose DP-EMAR, a differentially private, error model based autonomous repair framework that detects and reconstructs transmission induced distortions during FL aggregation. DP-EMAR estimates corruption patterns and applies adaptive correction before privacy noise is added, enabling reliable in network repair without violating confidentiality. By integrating Differential Privacy (DP) with Secure Aggregation (SA), the framework distinguishes DP noise from genuine transmission errors. Experiments on heterogeneous IoT sensor and graph datasets show that DP-EMAR preserves convergence stability and maintains near baseline performance under communication corruption while ensuring strict (epsilon, delta)-DP guarantees. The framework enhances robustness, communication efficiency, and trust in privacy preserving Federated IoT learning.
* Accepted and presented at the AI-IoT Workshop, co-located with COMSNETS 2025
LCA-Net: Light Convolutional Autoencoder for Image Dehazing
Aug 24, 2020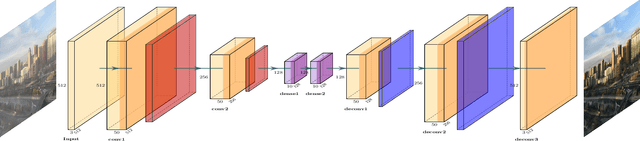
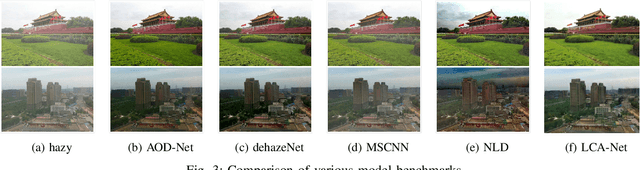

Image dehazing is a crucial image pre-processing task aimed at removing the incoherent noise generated by haze to improve the visual appeal of the image. The existing models use sophisticated networks and custom loss functions which are computationally inefficient and requires heavy hardware to run. Time is of the essence in image pre-processing since real time outputs can be obtained instantly. To overcome these problems, our proposed generic model uses a very light convolutional encoder-decoder network which does not depend on any atmospheric models. The network complexity-image quality trade off is handled well in this neural network and the performance of this network is not limited by low-spec systems. This network achieves optimum dehazing performance at a much faster rate, on several standard datasets, comparable to the state-of-the-art methods in terms of image quality.