 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-free Distortion Canceling and Control of Quantum Devices
Jul 13, 2024Quantum devices need precise control to achieve their full capability. In this work, we address the problem of controlling closed quantum systems, tackling two main issues. First, in practice the control signals are usually subject to unknown classical distortions that could arise from the device fabrication, material properties and/or instruments generating those signals. Second, in most cases modeling the system is very difficult or not even viable due to uncertainties in the relations between some variables and inaccessibility to some measurements inside the system. In this paper, we introduce a general model-free control approach based on deep reinforcement learning (DRL), that can work for any closed quantum system. We train a deep neural network (NN), using the REINFORCE policy gradient algorithm to control the state probability distribution of a closed quantum system as it evolves, and drive it to different target distributions. We present a novel controller architecture that comprises multiple NNs. This enables accommodating as many different target state distributions as desired, without increasing the complexity of the NN or its training process. The used DRL algorithm works whether the control problem can be modeled as a Markov decision process (MDP) or a partially observed MDP. Our method is valid whether the control signals are discrete- or continuous-valued. We verified our method through numerical simulations based on a photonic waveguide array chip. We trained a controller to generate sequences of different target output distributions of the chip with fidelity higher than 99%, where the controller showed superior performance in canceling the classical signal distortions.
Drift Reduction for Monocular Visual Odometry of Intelligent Vehicles using Feedforward Neural Networks
Jul 02, 2022
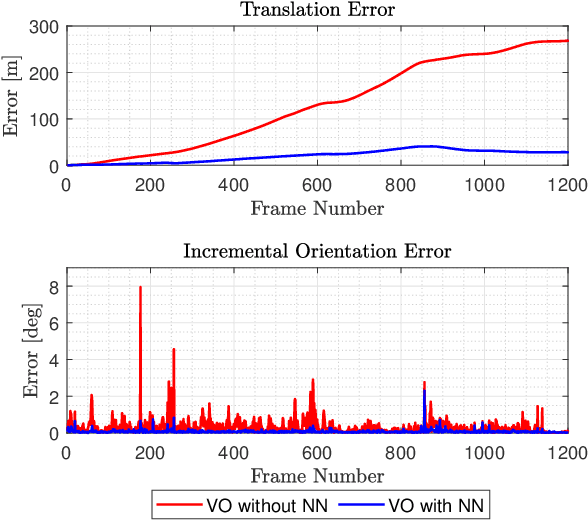
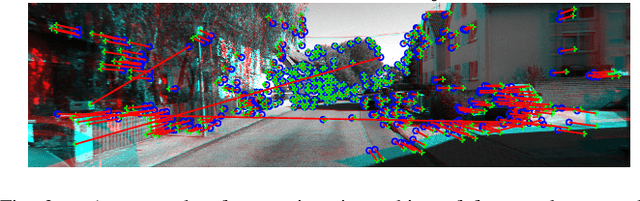
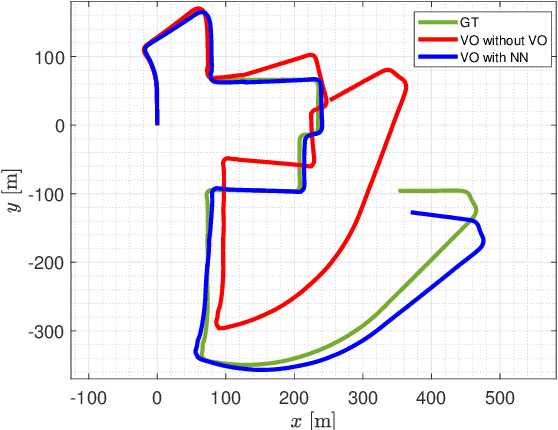
In this paper, an approach for reducing the drift in monocular visual odometry algorithms is proposed based on a feedforward neural network. A visual odometry algorithm computes the incremental motion of the vehicle between the successive camera frames, then integrates these increments to determine the pose of the vehicle. The proposed neural network reduces the errors in the pose estimation of the vehicle which results from the inaccuracies in features detection and matching, camera intrinsic parameters, and so on. These inaccuracies are propagated to the motion estimation of the vehicle causing larger amounts of estimation errors. The drift reducing neural network identifies such errors based on the motion of features in the successive camera frames leading to more accurate incremental motion estimates. The proposed drift reducing neural network is trained and validated using the KITTI dataset and the results show the efficacy of the proposed approach in reducing the errors in the incremental orientation estimation, thus reducing the overall error in the pose estimation.