 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-cultural analysis of pedestrian group behaviour influence on crossing decisions in interactions with autonomous vehicles
Aug 06, 2024Understanding cultural backgrounds is crucial for the seamless integration of autonomous driving into daily life as it ensures that systems are attuned to diverse societal norms and behaviours, enhancing acceptance and safety in varied cultural contexts. In this work, we investigate the impact of co-located pedestrians on crossing behaviour, considering cultural and situational factors. To accomplish this, a full-scale virtual reality (VR) environment was created in the CARLA simulator, enabling the identical experiment to be replicated in both Spain and Australia. Participants (N=30) attempted to cross the road at an urban crosswalk alongside other pedestrians exhibiting conservative to more daring behaviours, while an autonomous vehicle (AV) approached with different driving styles. For the analysis of interactions, we utilized questionnaires and direct measures of the moment when participants entered the lane. Our findings indicate that pedestrians tend to cross the same traffic gap together, even though reckless behaviour by the group reduces confidence and makes the situation perceived as more complex. Australian participants were willing to take fewer risks than Spanish participants, adopting more cautious behaviour when it was uncertain whether the AV would yield.
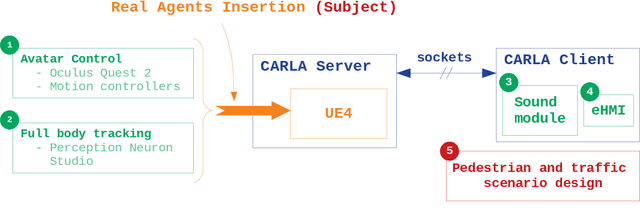
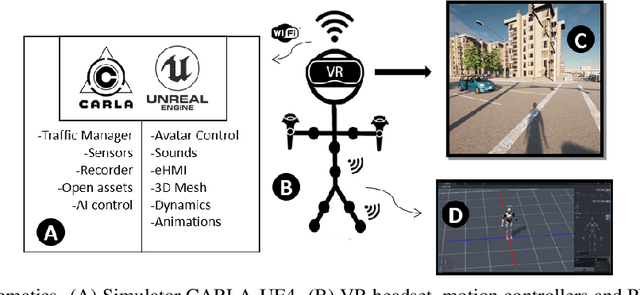
Realistic pedestrian behaviour in the CARLA simulator using VR and mocap
Sep 08, 2023Simulations are gaining increasingly significance in the field of autonomous driving due to the demand for rapid prototyping and extensive testing. Employing physics-based simulation brings several benefits at an affordable cost, while mitigating potential risks to prototypes, drivers, and vulnerable road users. However, there exit two primary limitations. Firstly, the reality gap which refers to the disparity between reality and simulation and prevents the simulated autonomous driving systems from having the same performance in the real world. Secondly, the lack of empirical understanding regarding the behavior of real agents, such as backup drivers or passengers, as well as other road users such as vehicles, pedestrians, or cyclists. Agent simulation is commonly implemented through deterministic or randomized probabilistic pre-programmed models, or generated from real-world data; but it fails to accurately represent the behaviors adopted by real agents while interacting within a specific simulated scenario. This paper extends the description of our proposed framework to enable real-time interaction between real agents and simulated environments, by means immersive virtual reality and human motion capture systems within the CARLA simulator for autonomous driving. We have designed a set of usability examples that allow the analysis of the interactions between real pedestrians and simulated autonomous vehicles and we provide a first measure of the user's sensation of presence in the virtual environment.
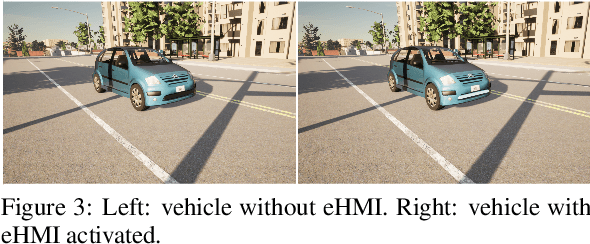
Digital twin in virtual reality for human-vehicle interactions in the context of autonomous driving
Mar 20, 2023The traditional simulation methods present some limitations, such as the reality gap between simulated experiences and real-world performance. In the field of autonomous driving research, we propose the handling of an immersive virtual reality system for pedestrians to include in simulations real behaviors of agents that interact with the simulated environment in real time, to improve the quality of the virtual-world data and reduce the gap. In this paper we employ a digital twin to replicate a study on communication interfaces between autonomous vehicles and pedestrians, generating an equivalent virtual scenario to compare the results and establish qualitative and quantitative measurements of the discrepancy. The goal is to evaluate the effectiveness and acceptability of implicit and explicit forms of communication in both scenarios and to verify that the behavior carried out by the pedestrian inside the simulator through a virtual reality interface is directly comparable with their role performed in a real traffic situation.
Insertion of real agents behaviors in CARLA autonomous driving simulator
Jun 01, 2022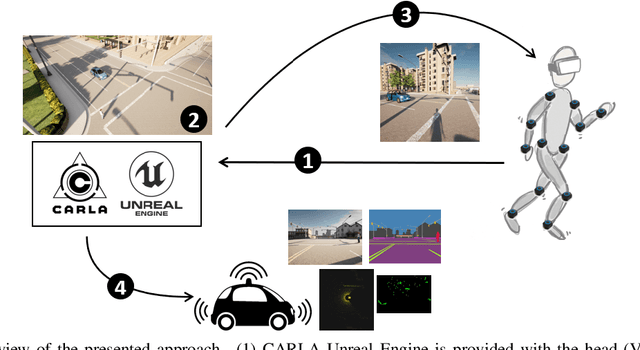
The role of simulation in autonomous driving is becoming increasingly important due to the need for rapid prototyping and extensive testing. The use of physics-based simulation involves multiple benefits and advantages at a reasonable cost while eliminating risks to prototypes, drivers and vulnerable road users. However, there are two main limitations. First, the well-known reality gap which refers to the discrepancy between reality and simulation that prevents simulated autonomous driving experience from enabling effective real-world performance. Second, the lack of empirical knowledge about the behavior of real agents, including backup drivers or passengers and other road users such as vehicles, pedestrians or cyclists. Agent simulation is usually pre-programmed deterministically, randomized probabilistically or generated based on real data, but it does not represent behaviors from real agents interacting with the specific simulated scenario. In this paper we present a preliminary framework to enable real-time interaction between real agents and the simulated environment (including autonomous vehicles) and generate synthetic sequences from simulated sensor data from multiple views that can be used for training predictive systems that rely on behavioral models. Our approach integrates immersive virtual reality and human motion capture systems with the CARLA simulator for autonomous driving. We describe the proposed hardware and software architecture, and discuss about the so-called behavioural gap or presence. We present preliminary, but promising, results that support the potential of this methodology and discuss about future steps.