 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstruction of Object Boundaries for the Autopilotof a Surface Robot from Satellite Imagesusing Computer Vision Methods
Dec 05, 2022
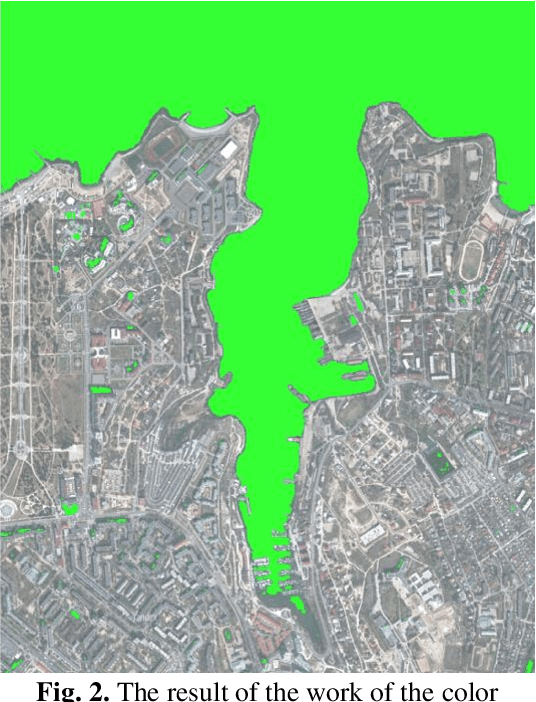

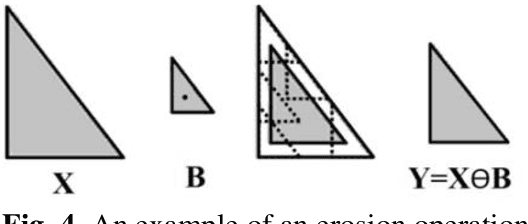
An algorithm and a program for detecting the boundaries of water bodies for the autopilot module of asurface robot are proposed. A method for detecting water objects on satellite maps by the method of finding a color in the HSV color space, using erosion, dilation - methods of digital image filtering is applied.The following operators for constructing contours on the image are investigated: the operators of Sobel,Roberts, Prewitt, and from them the one that detects the boundary more accurately is selected for thismodule. An algorithm for calculating the GPS coordinates of the contours is created. The proposed algorithm allows saving the result in a format suitable for the surface robot autopilot module.
* 9 pages, 11 figures, 24 formulas
Increasing the Accuracy of Sound Velocity Measurement in a Vector Single-Beam Acoustic Current Velocity Meter
Nov 30, 2022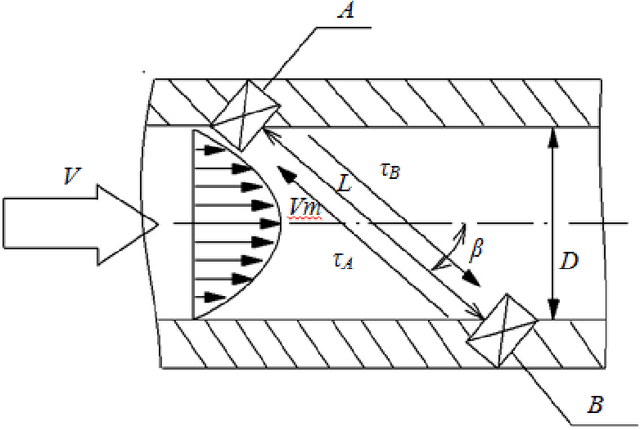
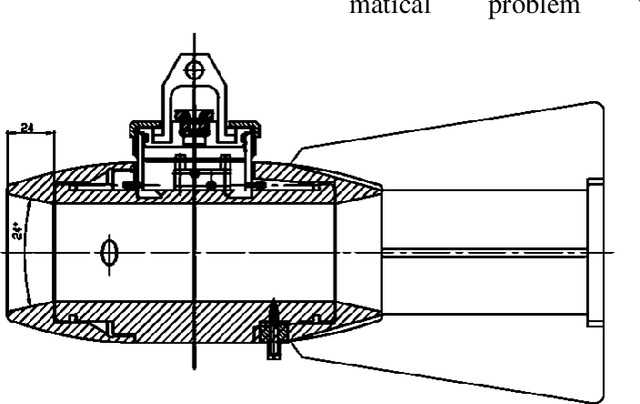
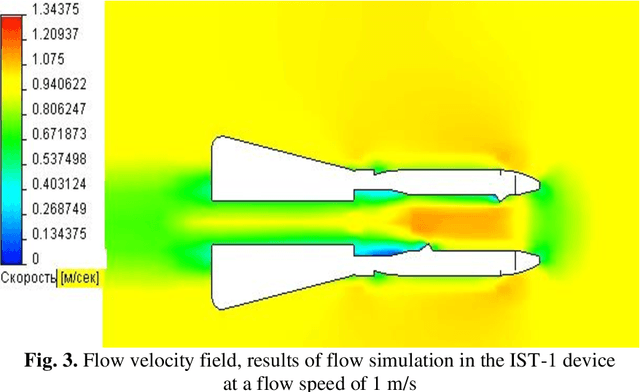
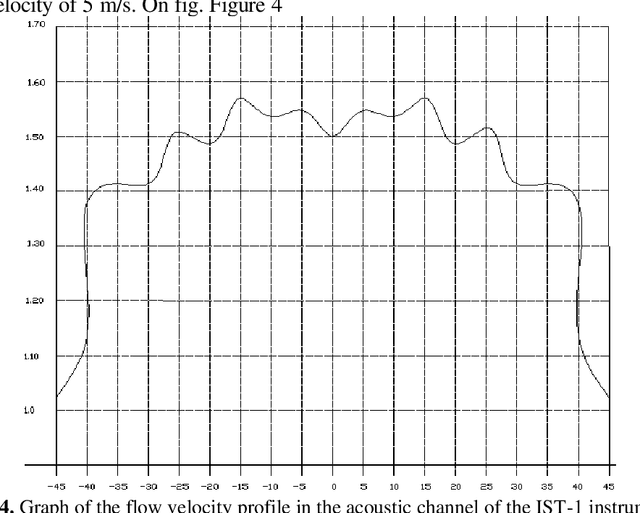
Acoustic flow velocity and direction meters from the IST series, which can be integrated into various measuring systems, are considered. The simulation of the flow profile in the measuring tube was carried out depending on the free flow velocity. A measurement method has been developed that uses the transit time of repeated acoustic signals reflected from the transducers, which makes it possible to take into account time hardware delays and a change in the length of the measuring base, which affect the determination of the speed of sound and flow, while increasing the accuracy of measuring the sound speed parameters with simultaneous measuring the flow velocity and temperatures for liquid media of different densities.
* 9 pages, 9 figures, 10 formulas
Application of the YOLOv5 Model for the Detection of Microobjects in the Marine Environment
Nov 28, 2022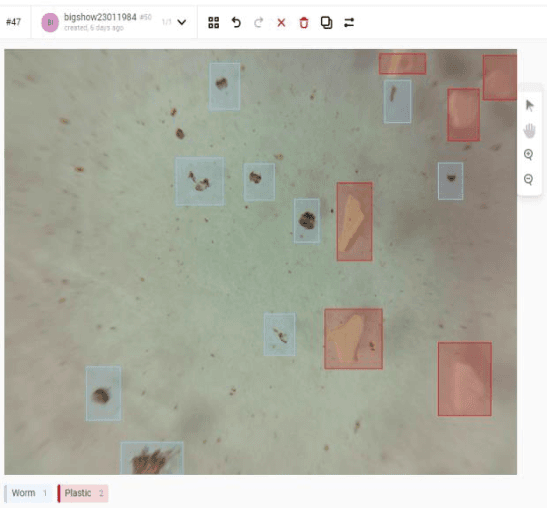
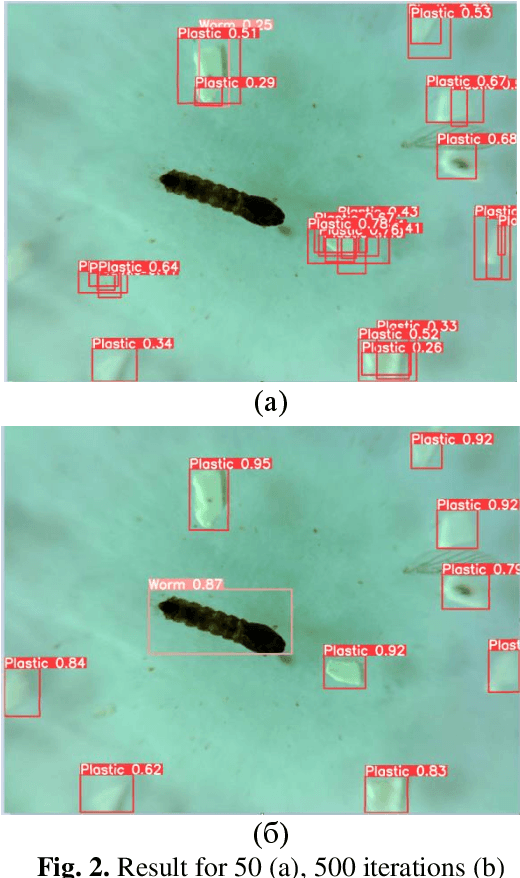
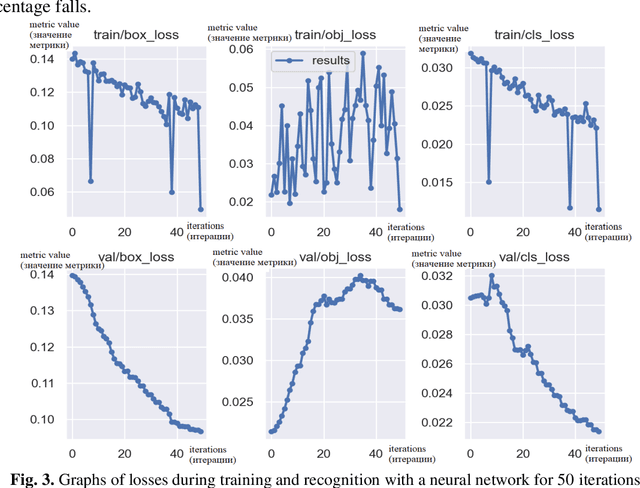
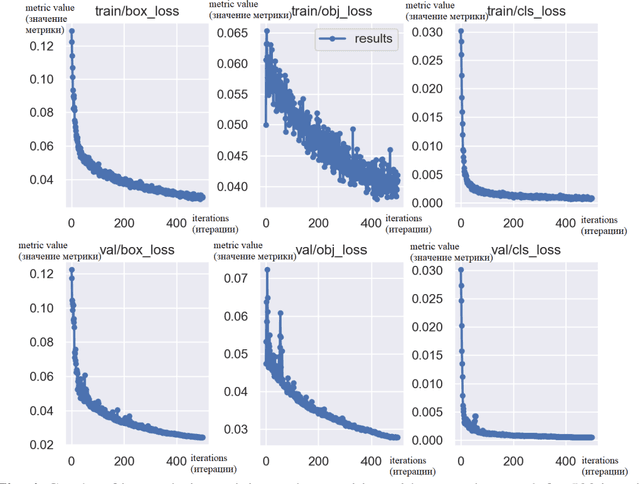
The efficiency of using the YOLOV5 machine learning model for solving the problem of automatic de-tection and recognition of micro-objects in the marine environment is studied. Samples of microplankton and microplastics were prepared, according to which a database of classified images was collected for training an image recognition neural network. The results of experiments using a trained network to find micro-objects in photo and video images in real time are presented. Experimental studies have shown high efficiency, comparable to manual recognition, of the proposed model in solving problems of detect-ing micro-objects in the marine environment.