 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFloGAN: Scenario-Based Urban Mobility Flow Generation via Conditional GANs and Dynamic Region Decoupling
Jul 16, 2025The mobility patterns of people in cities evolve alongside changes in land use and population. This makes it crucial for urban planners to simulate and analyze human mobility patterns for purposes such as transportation optimization and sustainable urban development. Existing generative models borrowed from machine learning rely heavily on historical trajectories and often overlook evolving factors like changes in population density and land use. Mechanistic approaches incorporate population density and facility distribution but assume static scenarios, limiting their utility for future projections where historical data for calibration is unavailable. This study introduces a novel, data-driven approach for generating origin-destination mobility flows tailored to simulated urban scenarios. Our method leverages adaptive factors such as dynamic region sizes and land use archetypes, and it utilizes conditional generative adversarial networks (cGANs) to blend historical data with these adaptive parameters. The approach facilitates rapid mobility flow generation with adjustable spatial granularity based on regions of interest, without requiring extensive calibration data or complex behavior modeling. The promising performance of our approach is demonstrated by its application to mobile phone data from Singapore, and by its comparison with existing methods.
Self-Organizing Map assisted Deep Autoencoding Gaussian Mixture Model for Intrusion Detection
Aug 28, 2020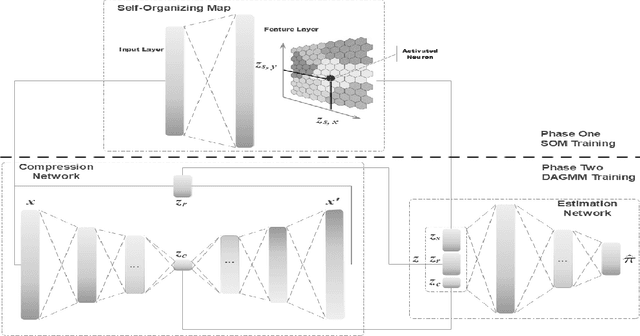
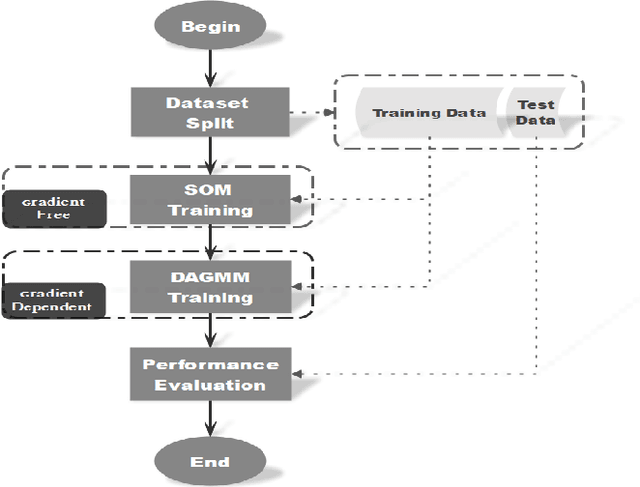
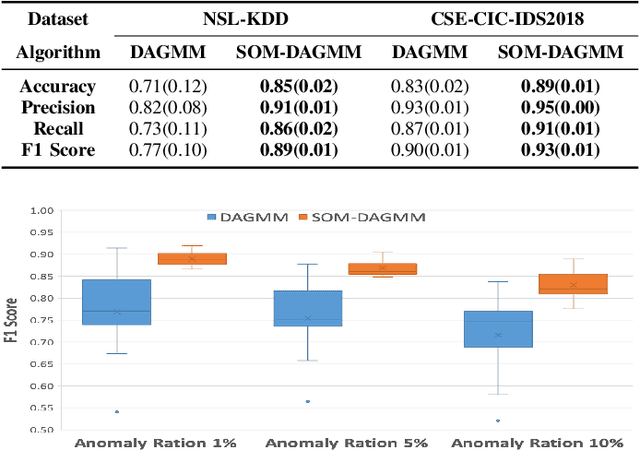
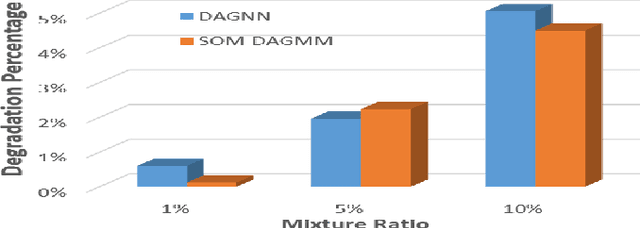
In the information age, a secure and stable network environment is essential and hence intrusion detection is critical for any networks. In this paper, we propose a self-organizing map assisted deep autoencoding Gaussian mixture model (SOMDAGMM) supplemented with well-preserved input space topology for more accurate network intrusion detection. The deep autoencoding Gaussian mixture model comprises a compression network and an estimation network which is able to perform unsupervised joint training. However, the code generated by the autoencoder is inept at preserving the topology of the input space, which is rooted in the bottleneck of the adopted deep structure. A self-organizing map has been introduced to construct SOMDAGMM for addressing this issue. The superiority of the proposed SOM-DAGMM is empirically demonstrated with extensive experiments conducted upon two datasets. Experimental results show that SOM-DAGMM outperforms state-of-the-art DAGMM on all tests, and achieves up to 15.58% improvement in F1 score and with better stability.