 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObservation-dependent Bayesian active learning via input-warped Gaussian processes
Feb 02, 2026Bayesian active learning relies on the precise quantification of predictive uncertainty to explore unknown function landscapes. While Gaussian process surrogates are the standard for such tasks, an underappreciated fact is that their posterior variance depends on the observed outputs only through the hyperparameters, rendering exploration largely insensitive to the actual measurements. We propose to inject observation-dependent feedback by warping the input space with a learned, monotone reparameterization. This mechanism allows the design policy to expand or compress regions of the input space in response to observed variability, thereby shaping the behavior of variance-based acquisition functions. We demonstrate that while such warps can be trained via marginal likelihood, a novel self-supervised objective yields substantially better performance. Our approach improves sample efficiency across a range of active learning benchmarks, particularly in regimes where non-stationarity challenges traditional methods.
Machine learning for in-situ composition mapping in a self-driving magnetron sputtering system
Jun 06, 2025



Self-driving labs (SDLs), employing automation and machine learning (ML) to accelerate experimental procedures, have enormous potential in the discovery of new materials. However, in thin film science, SDLs are mainly restricted to solution-based synthetic methods which are easier to automate but cannot access the broad chemical space of inorganic materials. This work presents an SDL based on magnetron co-sputtering. We are using combinatorial frameworks, obtaining accurate composition maps on multi-element, compositionally graded thin films. This normally requires time-consuming ex-situ analysis prone to systematic errors. We present a rapid and calibration-free in-situ, ML driven approach to produce composition maps for arbitrary source combinations and sputtering conditions. We develop a method to predict the composition distribution in a multi-element combinatorial thin film, using in-situ measurements from quartz-crystal microbalance sensors placed in a sputter chamber. For a given source, the sensor readings are learned as a function of the sputtering pressure and magnetron power, through active learning using Gaussian processes (GPs). The final GPs are combined with a geometric model of the deposition flux distribution in the chamber, which allows interpolation of the deposition rates from each source, at any position across the sample. We investigate several acquisition functions for the ML procedure. A fully Bayesian GP - BALM (Bayesian active learning MacKay) - achieved the best performance, learning the deposition rates for a single source in 10 experiments. Prediction accuracy for co-sputtering composition distributions was verified experimentally. Our framework dramatically increases throughput by avoiding the need for extensive characterisation or calibration, thus demonstrating the potential of ML-guided SDLs to accelerate materials exploration.
Analysis of Driving Scenario Trajectories with Active Learning
Aug 06, 2021
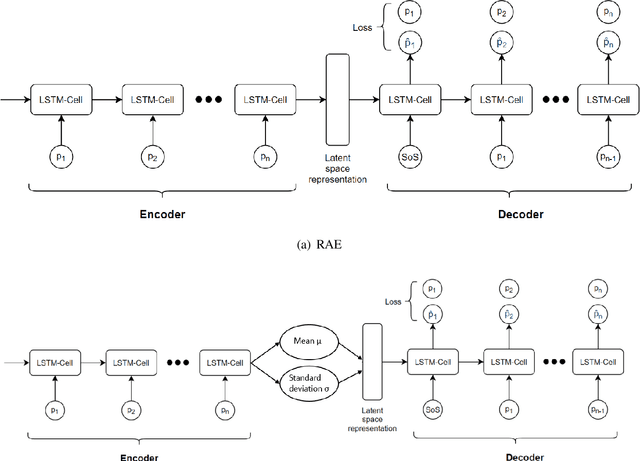
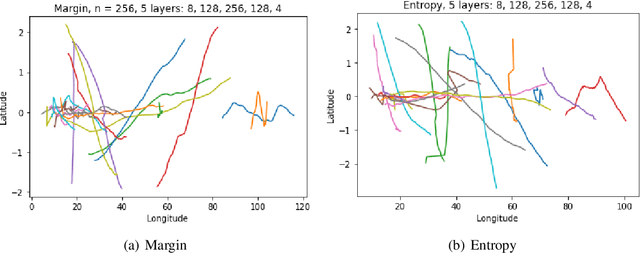
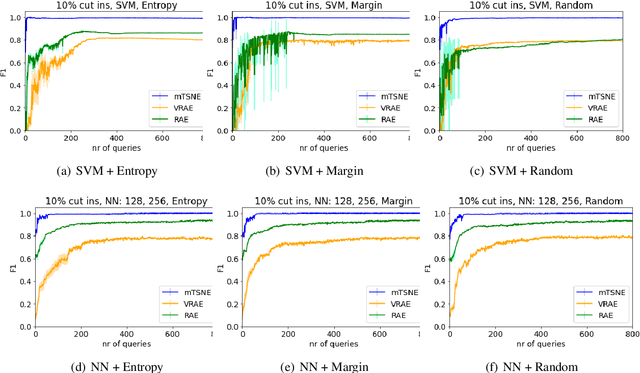
Annotating the driving scenario trajectories based only on explicit rules (i.e., knowledge-based methods) can be subject to errors, such as false positive/negative classification of scenarios that lie on the border of two scenario classes, missing unknown scenario classes, and also anomalies. On the other side, verifying the labels by the annotators is not cost-efficient. For this purpose, active learning (AL) could potentially improve the annotation procedure by inclusion of an annotator/expert in an efficient way. In this study, we develop an active learning framework to annotate driving trajectory time-series data. At the first step, we compute an embedding of the time-series trajectories into a latent space in order to extract the temporal nature. For this purpose, we study three different latent space representations: multivariate Time Series t-Distributed Stochastic Neighbor Embedding (mTSNE), Recurrent Auto-Encoder (RAE) and Variational Recurrent Auto-Encoder (VRAE). We then apply different active learning paradigms with different classification models to the embedded data. In particular, we study the two classifiers Neural Network (NN) and Support Vector Machines (SVM), with three active learning query strategies (i.e., entropy, margin and random). In the following, we explore the possibilities of the framework to discover unknown classes and demonstrate how it can be used to identify the out-of-class trajectories.