 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive Slip Control in Multifingered Grasping: Hybrid Tactile Sensing and Internal-Force Optimization
Feb 18, 2026We present a hybrid learning and model-based approach that adapts internal grasp forces to halt in-hand slip on a multifingered robotic gripper. A multimodal tactile stack combines piezoelectric (PzE) sensing for fast slip cues with piezoresistive (PzR) arrays for contact localization, enabling online construction of the grasp matrix. Upon slip, we update internal forces computed in the null space of the grasp via a quadratic program that preserves the object wrench while enforcing actuation limits. The pipeline yields a theoretical sensing-to-command latency of 35-40 ms, with 5 ms for PzR-based contact and geometry updates and about 4 ms for the quadratic program solve. In controlled trials, slip onset is detected at 20ms. We demonstrate closed-loop stabilization on multifingered grasps under external perturbations. Augmenting efficient analytic force control with learned tactile cues yields both robustness and rapid reactions, as confirmed in our end-to-end evaluation. Measured delays are dominated by the experimental data path rather than actual computation. The analysis outlines a clear route to sub-50 ms closed-loop stabilization.
Human Initiated Grasp Space Exploration Algorithm for an Underactuated Robot Gripper Using Variational Autoencoder
Sep 20, 2021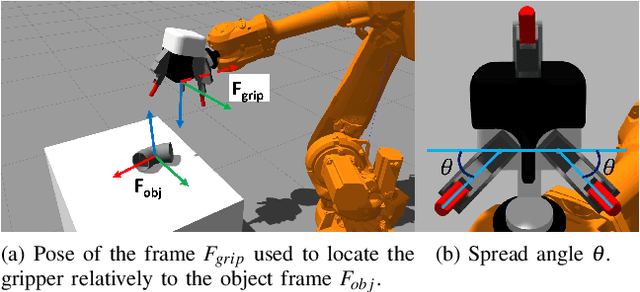
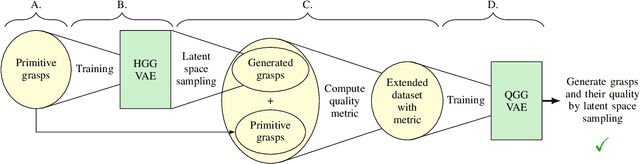
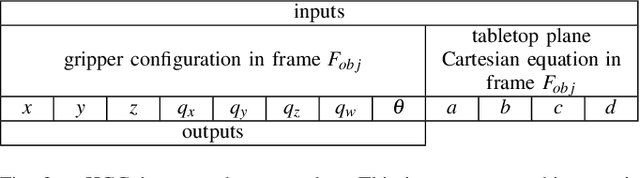
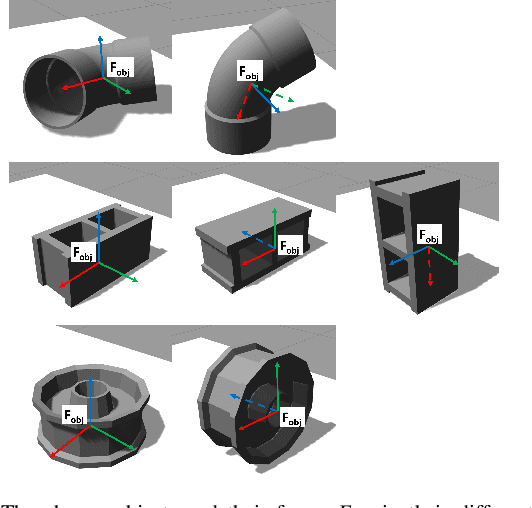
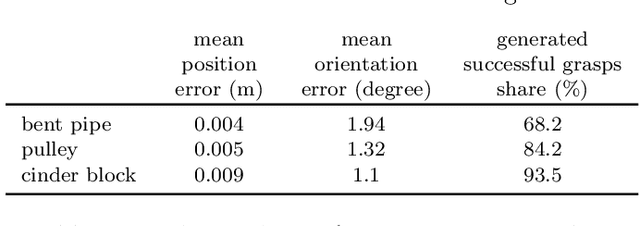
Grasp planning and most specifically the grasp space exploration is still an open issue in robotics. This article presents an efficient procedure for exploring the grasp space of a multifingered adaptive gripper for generating reliable grasps given a known object pose. This procedure relies on a limited dataset of manually specified expert grasps, and use a mixed analytic and data-driven approach based on the use of a grasp quality metric and variational autoencoders. The performances of this method are assessed by generating grasps in simulation for three different objects. On this grasp planning task, this method reaches a grasp success rate of 99.91% on 7000 trials.
Learning to Model the Grasp Space of an Underactuated Robot Gripper Using Variational Autoencoder
Sep 17, 2021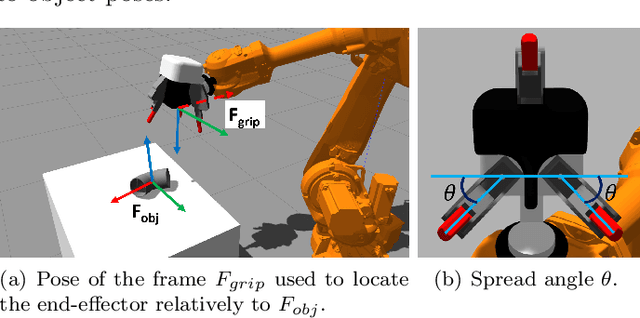
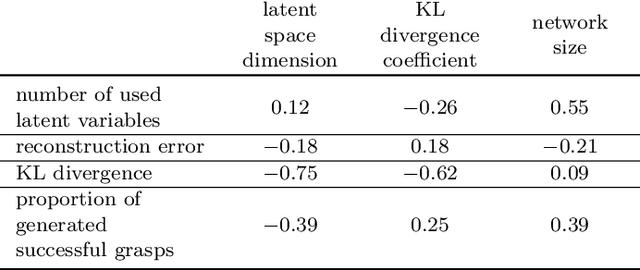
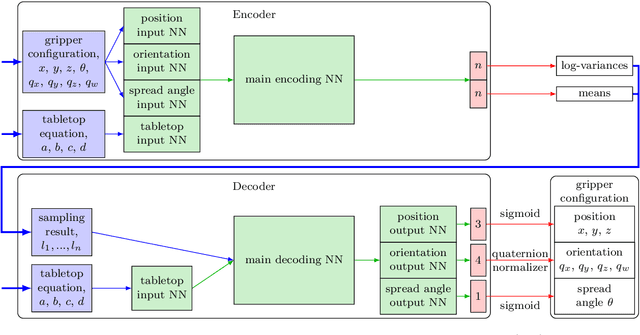
Grasp planning and most specifically the grasp space exploration is still an open issue in robotics. This article presents a data-driven oriented methodology to model the grasp space of a multi-fingered adaptive gripper for known objects. This method relies on a limited dataset of manually specified expert grasps, and uses variational autoencoder to learn grasp intrinsic features in a compact way from a computational point of view. The learnt model can then be used to generate new non-learnt gripper configurations to explore the grasp space.
* accepted at SYSID 2021 conference