 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Control and Simulation of Dynamic Robot Teams in the Domain of CFK Production
Oct 20, 2022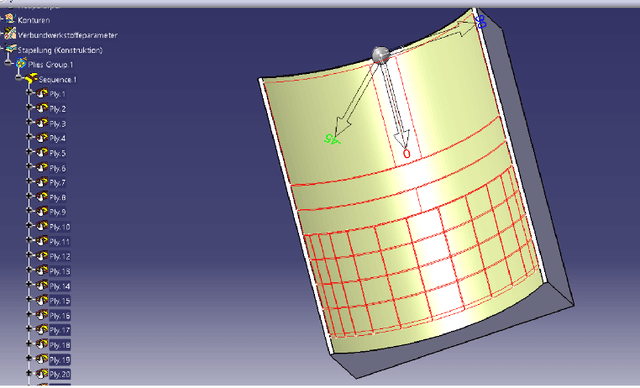
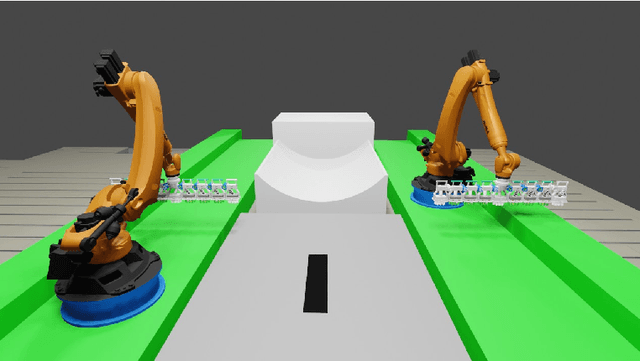
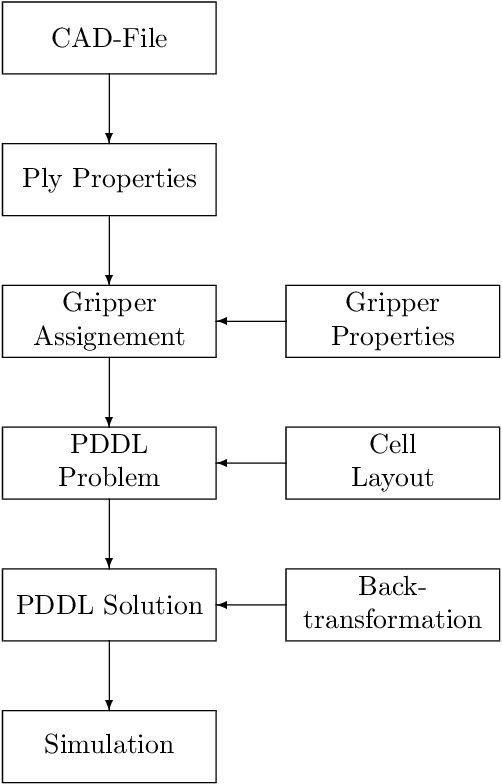
This paper is concerned with the automation and simulation of pick and place processes in the domain of CFK aircraft production. We introduce a workflow which starts from a CAD construction, extracts relevant data out of it, assigns grippers to the CFK pieces and schedules the single steps using a PDDL solver. Finally, the result is visualized in Blender where also prior mistakes can be identified.
Comparing Popular Simulation Environments in the Scope of Robotics and Reinforcement Learning
Mar 08, 2021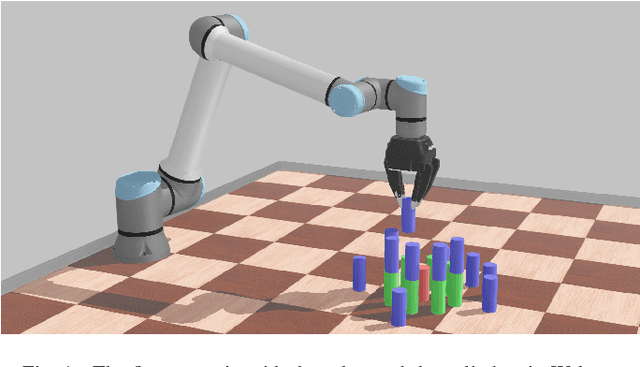

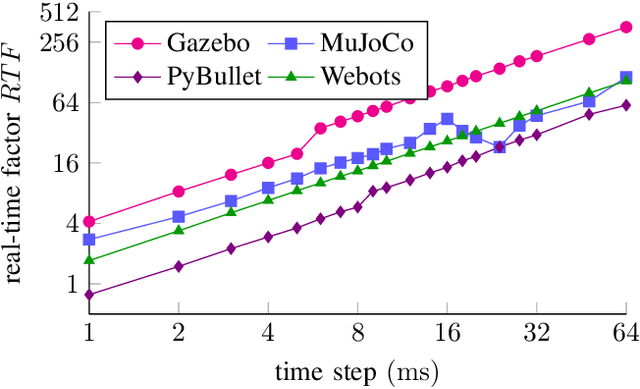
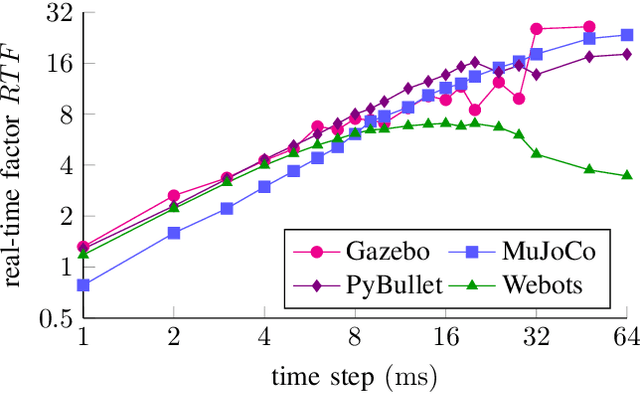
This letter compares the performance of four different, popular simulation environments for robotics and reinforcement learning (RL) through a series of benchmarks. The benchmarked scenarios are designed carefully with current industrial applications in mind. Given the need to run simulations as fast as possible to reduce the real-world training time of the RL agents, the comparison includes not only different simulation environments but also different hardware configurations, ranging from an entry-level notebook up to a dual CPU high performance server. We show that the chosen simulation environments benefit the most from single core performance. Yet, using a multi core system, multiple simulations could be run in parallel to increase the performance.