 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffline Reinforcement Learning for Rotation Profile Control in Tokamaks
May 07, 2026Tokamaks remain leading candidates for achieving practical fusion energy, yet many important control problems inside these devices are still difficult or unsolved. One such challenge is controlling the plasma rotation profile, which strongly influences stability, confinement, and transport. While the average rotation can be controlled, controlling the full profile is challenging due to high dimensionality, response to multiple actuators and dependence on plasma condition. Learning-based control methods, such as reinforcement learning (RL), provide a potential solution to this challenging problem with ability to model complex interactions leading to effective multi-input multi-output control. However, learning such policies is challenging due to the lack of accurate simulators that can model the rotation profile dynamics. In this work, we investigate the use of offline RL and offline model-based RL algorithms for rotation profile control, training them solely on historical data from the DIII-D tokamak. Our final method uses probabilistic models of plasma dynamics to generate rollouts for RL training. We deploy this policy on the DIII-D Tokamak and observe promising real-world results. We conclude by highlighting key challenges and insights from training and deploying an RL policy on a complex physical device while using only limited past data.
Multi-Timescale Dynamics Model Bayesian Optimization for Plasma Stabilization in Tokamaks
Jun 12, 2025Machine learning algorithms often struggle to control complex real-world systems. In the case of nuclear fusion, these challenges are exacerbated, as the dynamics are notoriously complex, data is poor, hardware is subject to failures, and experiments often affect dynamics beyond the experiment's duration. Existing tools like reinforcement learning, supervised learning, and Bayesian optimization address some of these challenges but fail to provide a comprehensive solution. To overcome these limitations, we present a multi-scale Bayesian optimization approach that integrates a high-frequency data-driven dynamics model with a low-frequency Gaussian process. By updating the Gaussian process between experiments, the method rapidly adapts to new data, refining the predictions of the less reliable dynamical model. We validate our approach by controlling tearing instabilities in the DIII-D nuclear fusion plant. Offline testing on historical data shows that our method significantly outperforms several baselines. Results on live experiments on the DIII-D tokamak, conducted under high-performance plasma scenarios prone to instabilities, shows a 50% success rate, marking a 117% improvement over historical outcomes.
Hidden Parameter Recurrent State Space Models For Changing Dynamics Scenarios
Jun 29, 2022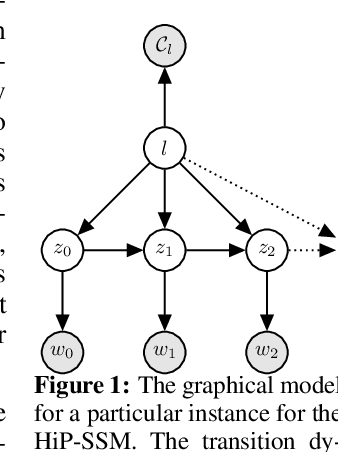

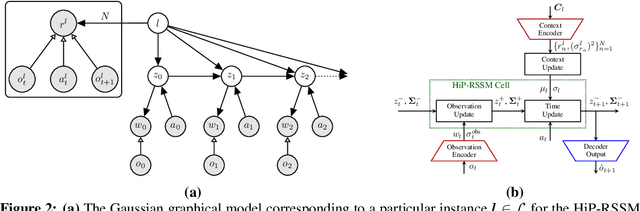
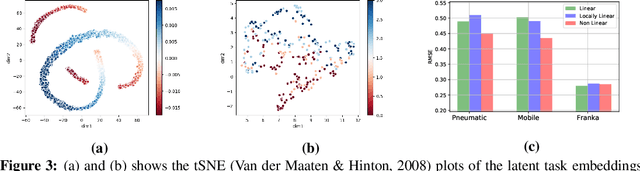
Recurrent State-space models (RSSMs) are highly expressive models for learning patterns in time series data and system identification. However, these models assume that the dynamics are fixed and unchanging, which is rarely the case in real-world scenarios. Many control applications often exhibit tasks with similar but not identical dynamics which can be modeled as a latent variable. We introduce the Hidden Parameter Recurrent State Space Models (HiP-RSSMs), a framework that parametrizes a family of related dynamical systems with a low-dimensional set of latent factors. We present a simple and effective way of learning and performing inference over this Gaussian graphical model that avoids approximations like variational inference. We show that HiP-RSSMs outperforms RSSMs and competing multi-task models on several challenging robotic benchmarks both on real-world systems and simulations.