 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSA-NET.v2: Real-time vehicle detection from oblique UAV images with use of uncertainty estimation in deep meta-learning
Aug 04, 2022
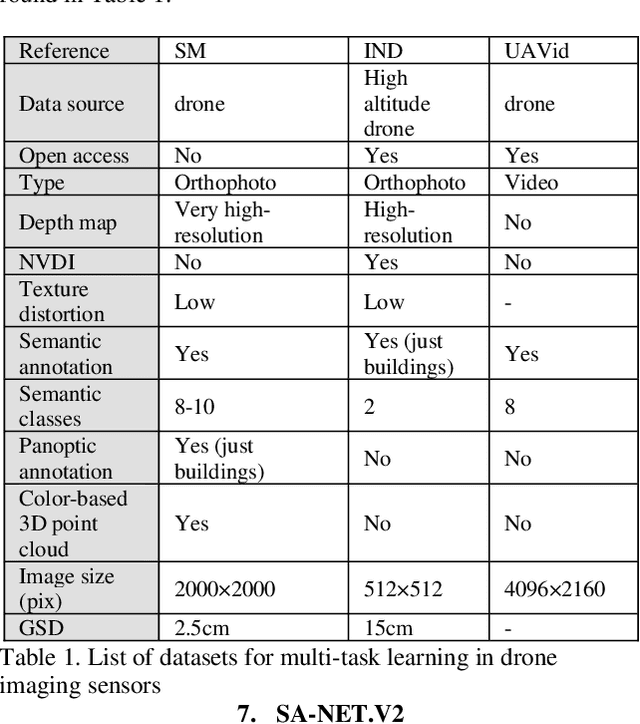
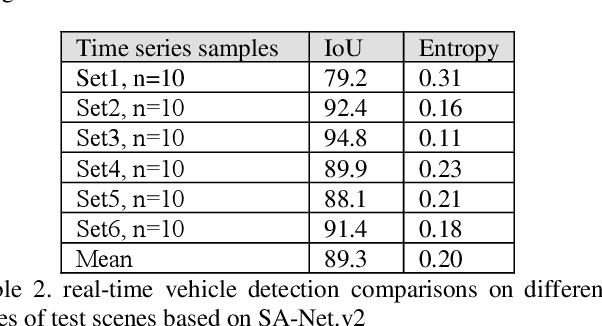

In recent years, unmanned aerial vehicle (UAV) imaging is a suitable solution for real-time monitoring different vehicles on the urban scale. Real-time vehicle detection with the use of uncertainty estimation in deep meta-learning for the portable platforms (e.g., UAV) potentially improves video understanding in real-world applications with a small training dataset, while many vehicle monitoring approaches appear to understand single-time detection with a big training dataset. The purpose of real-time vehicle detection from oblique UAV images is to locate the vehicle on the time series UAV images by using semantic segmentation. Real-time vehicle detection is more difficult due to the variety of depth and scale vehicles in oblique view UAV images. Motivated by these facts, in this manuscript, we consider the problem of real-time vehicle detection for oblique UAV images based on a small training dataset and deep meta-learning. The proposed architecture, called SA-Net.v2, is a developed method based on the SA-CNN for real-time vehicle detection by reformulating the squeeze-and-attention mechanism. The SA-Net.v2 is composed of two components, including the squeeze-and-attention function that extracts the high-level feature based on a small training dataset, and the gated CNN. For the real-time vehicle detection scenario, we test our model on the UAVid dataset. UAVid is a time series oblique UAV images dataset consisting of 30 video sequences. We examine the proposed method's applicability for stand real-time vehicle detection in urban environments using time series UAV images. The experiments show that the SA-Net.v2 achieves promising performance in time series oblique UAV images.
Deep few-shot learning for bi-temporal building change detection
Aug 25, 2021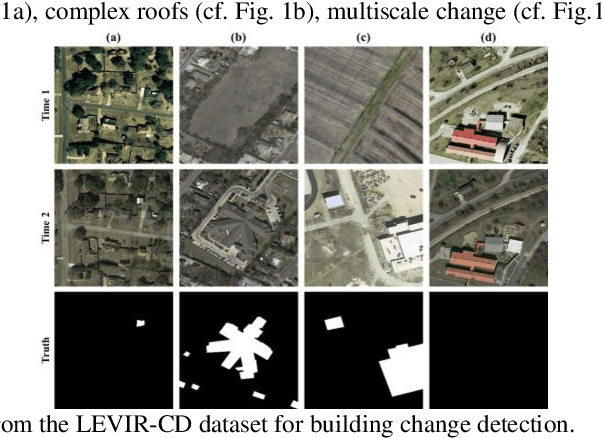
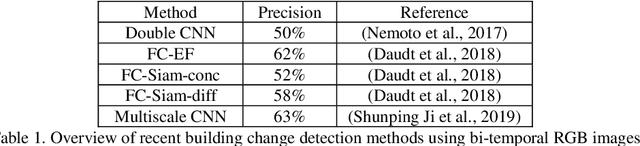
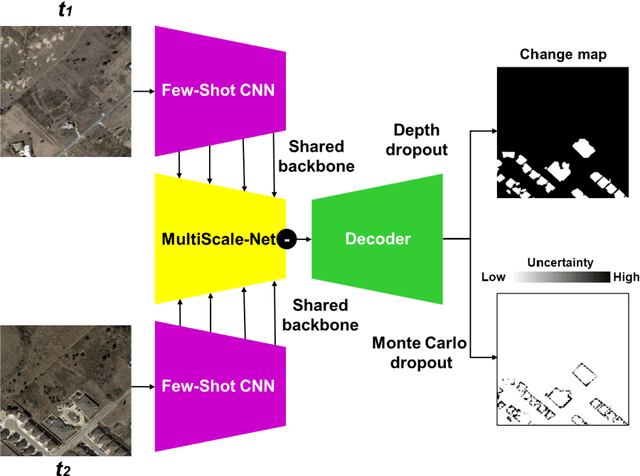
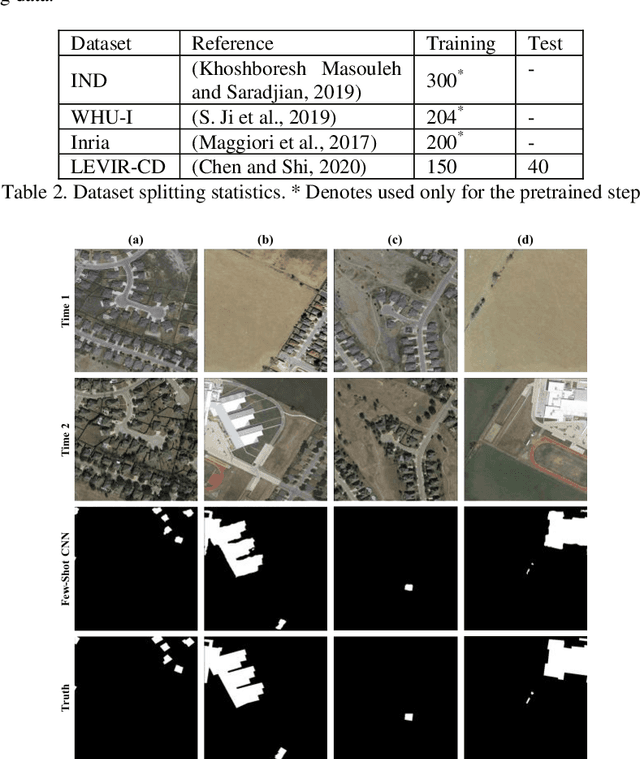
In real-world applications (e.g., change detection), annotating images is very expensive. To build effective deep learning models in these applications, deep few-shot learning methods have been developed and prove to be a robust approach in small training data. The analysis of building change detection from high spatial resolution remote sensing observations is important research in photogrammetry, computer vision, and remote sensing nowadays, which can be widely used in a variety of real-world applications, such as map updating. As manual high resolution image interpretation is expensive and time-consuming, building change detection methods are of high interest. The interest in developing building change detection approaches from optical remote sensing images is rapidly increasing due to larger coverages, and lower costs of optical images. In this study, we focus on building change detection analysis on a small set of building change from different regions that sit in several cities. In this paper, a new deep few-shot learning method is proposed for building change detection using Monte Carlo dropout and remote sensing observations. The setup is based on a small dataset, including bitemporal optical images labeled for building change detection.
* 5 pages, 3 figures