 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a Polymer-based Steerable Cannula for Neurosurgical Applications
Dec 19, 2025Robotically steerable compliant surgical tools offer several advantages over rigid tools, including enhanced dexterity, reduced tissue damage, and the ability to generate non-linear trajectories in minimally invasive neurosurgical procedures. Many existing robotic neurosurgical tools are designed using stainless steel or nitinol materials. Using polymer-based materials instead can offer advantages such as reduced interference in magnetic resonance imaging, enhanced safety for guiding electrically powered instruments, and reduced tissue damage due to inherent compliance. Several polymer materials have been used in robotic surgical applications, such as polyimide, polycarbonate, and elastic resin. Various fabrication strategies have also been proposed, including standard microfabrication techniques, thermal drawing, and 3-D printing. In our previous work, a tendon-driven, notched-tube was designed for several neurosurgical robotic tools, utilizing laser micromachining to reduce the stiffness of the tube in certain directions. This fabrication method is desirable because it has a single-step process, has high precision, and does not require a cleanroom or harsh chemicals. Past studies have explored laser-micromachining of polymer material for surgical applications such as stent fabrication. In this work, we explore extending the use of the laser micromachining approach to the fabrication of polyimide (PI) robotically steerable cannulas for neurosurgical applications. Utilizing the method presented in this work, we fabricated joints as small as 1.5 mm outer diameter (OD). Multiple joints were fabricated using PI tubes of different ODs, and the loading behavior of the fabricated joints was experimentally characterized.
Evaluating the Navigation Capabilities of a Modified COAST Guidewire Robot in an Anatomical Phantom Model
Dec 15, 2025To address the issues that arise due to the manual navigation of guidewires in endovascular interventions, research in medical robotics has taken a strong interest in developing robotically steerable guidewires, which offer the possibility of enhanced maneuverability and navigation, as the tip of the guidewire can be actively steered. The COaxially Aligned STeerable (COAST) guidewire robot has the ability to generate a wide variety of motions including bending motion with different bending lengths, follow-the-leader motion, and feedforward motion. In our past studies, we have explored different designs of the COAST guidewire robot and developed modeling, control, and sensing strategies for the COAST guidewire robot. In this study, the performance of a modified COAST guidewire robot is evaluated by conducting navigation experiments in an anatomical phantom model with pulsatile flow. The modified COAST guidewire robot is a simplified version of the COAST guidewire robot and consists of two tubes as opposed to three tubes. Through this study, we demonstrate the effectiveness of the modified COAST guidewire robot in navigating the tortuous phantom vasculature.
Overtwisting and Coiling Highly Enhances Strain Generation of Twisted String Actuators
Sep 23, 2022



Twisted string actuators (TSAs) have exhibited great promise in robotic applications by generating high translational force with low input torque. To further facilitate their robotic applications, it is strongly desirable but challenging to enhance their consistent strain generation while maintaining compliance. Existing studies predominantly considered overtwisting and coiling after the regular twisting stage to be undesirable non-uniform and unpredictable knots, entanglements, and coils formed to create an unstable and failure-prone structure. Overtwisting would work well for TSAs when uniform coils can be consistently formed. In this study, we realize uniform and consistent coil formation in overtwisted TSAs, which greatly increases their strain. Furthermore, we investigate methods for enabling uniform coil formation upon overtwisting the strings in a TSA and present a procedure to systematically "train" the strings. To the authors' best knowledge, this is the first study to experimentally investigate overtwisting for TSAs with different stiffnesses and realize consistent uniform coil formation. Ultra-high molecular-weight polyethylene (UHMWPE) strings form the stiff TSAs whereas compliant TSAs are realized with stretchable and conductive supercoiled polymer (SCP) strings. The strain, force, velocity, and torque of each overtwisted TSA was studied. Overtwisting and coiling resulted in approximately 70% strain in stiff TSAs and approximately 60% strain in compliant TSAs. This is more than twice the strain achieved through regular twisting. Lastly, the overtwisted TSA was successfully demonstrated in a robotic bicep.
Anthropomorphic Twisted String-Actuated Soft Robotic Gripper with Tendon-Based Stiffening
Jul 07, 2022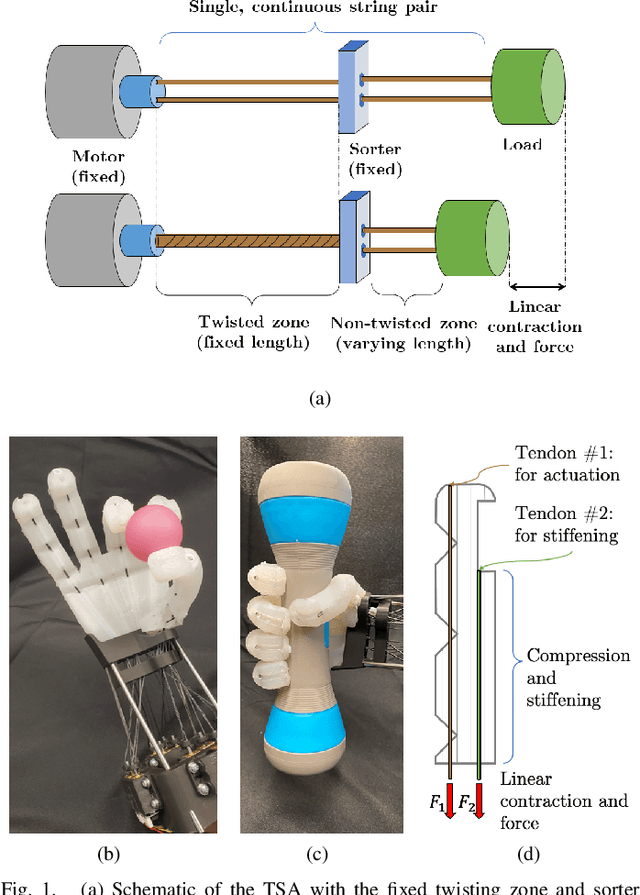
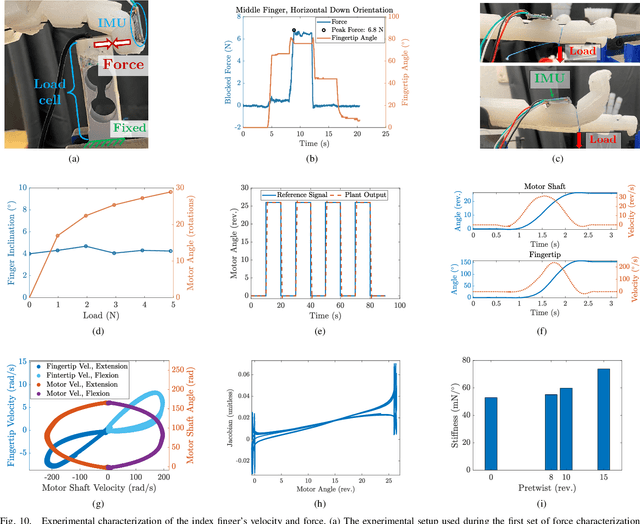
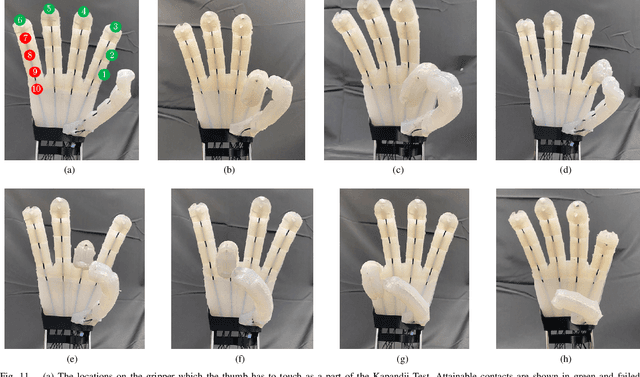
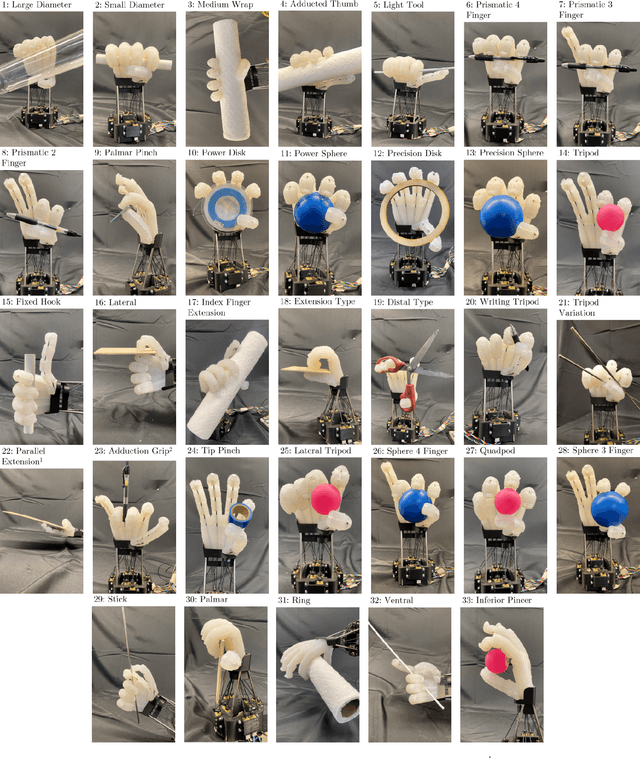
Realizing high-performance soft robotic grippers is challenging because of the inherent limitations of the soft actuators and artificial muscles that drive them. Although existing soft robotic grippers exhibit acceptable performance, their design and fabrication are still an open problem. This paper explores twisted string actuators (TSAs) to drive a soft robotic gripper. TSAs have been widely used in numerous robotic applications, but their inclusion in soft robots has been limited. The proposed design of the gripper was inspired by the human hand, with four fingers and a thumb. Tunable stiffness was implemented in the fingers by using antagonistic TSAs. The fingers' bending angles, actuation speed, blocked force output, and stiffness tuning were experimentally characterized. The gripper was able to achieve a score of 6 on the Kapandji test, and was also to achieve 31 of the 33 grasps of the Feix GRASP taxonomy. A comparison study revealed that the proposed gripper exhibited equivalent or superior performance compared to other similar grippers.