 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMUN-FRL: A Visual Inertial LiDAR Dataset for Aerial Autonomous Navigation and Mapping
Oct 12, 2023This paper presents a unique outdoor aerial visual-inertial-LiDAR dataset captured using a multi-sensor payload to promote the global navigation satellite system (GNSS)-denied navigation research. The dataset features flight distances ranging from 300m to 5km, collected using a DJI M600 hexacopter drone and the National Research Council (NRC) Bell 412 Advanced Systems Research Aircraft (ASRA). The dataset consists of hardware synchronized monocular images, IMU measurements, 3D LiDAR point-clouds, and high-precision real-time kinematic (RTK)-GNSS based ground truth. Ten datasets were collected as ROS bags over 100 mins of outdoor environment footage ranging from urban areas, highways, hillsides, prairies, and waterfronts. The datasets were collected to facilitate the development of visual-inertial-LiDAR odometry and mapping algorithms, visual-inertial navigation algorithms, object detection, segmentation, and landing zone detection algorithms based upon real-world drone and full-scale helicopter data. All the datasets contain raw sensor measurements, hardware timestamps, and spatio-temporally aligned ground truth. The intrinsic and extrinsic calibrations of the sensors are also provided along with raw calibration datasets. A performance summary of state-of-the-art methods applied on the datasets is also provided.
The Right Invariant Nonlinear Complementary Filter for Low Cost Attitude and Heading Estimation of Platforms
Dec 01, 2016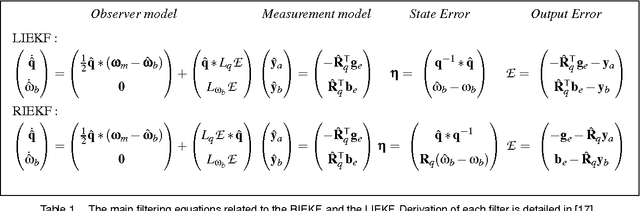
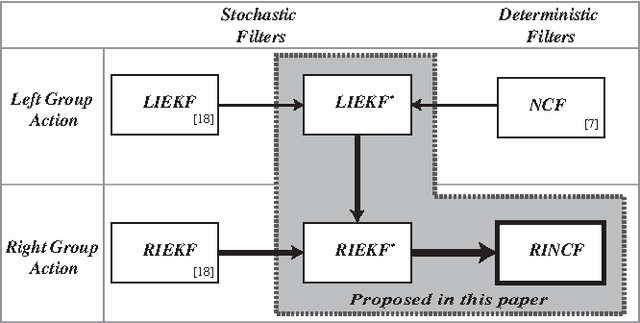
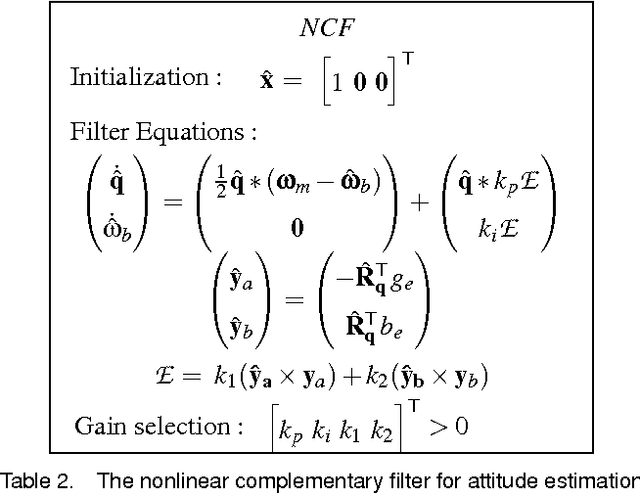
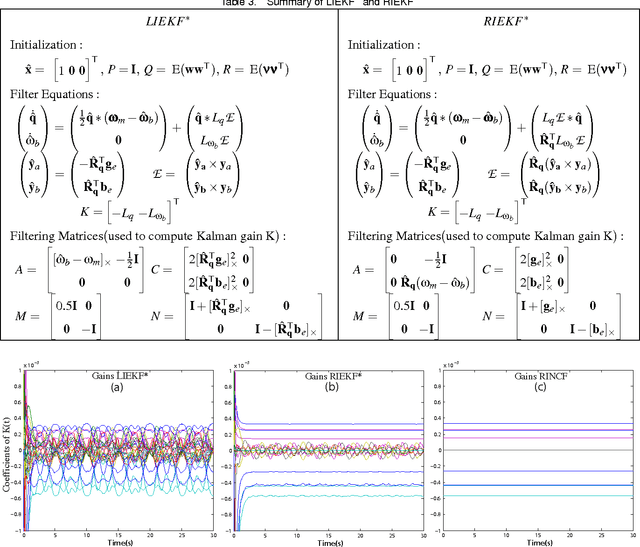
This paper presents a novel filter with low computational demand to address the problem of orientation estimation of a robotic platform. This is conventionally addressed by extended Kalman filtering of measurements from a sensor suit which mainly includes accelerometers, gyroscopes, and a digital compass. Low cost robotic platforms demand simpler and computationally more efficient methods to address this filtering problem. Hence nonlinear observers with constant gains have emerged to assume this role. The nonlinear complementary filter is a popular choice in this domain which does not require covariance matrix propagation and associated computational overhead in its filtering algorithm. However, the gain tuning procedure of the complementary filter is not optimal, where it is often hand picked by trial and error. This process is counter intuitive to system noise based tuning capability offered by a stochastic filter like the Kalman filter. This paper proposes the right invariant formulation of the complementary filter, which preserves Kalman like system noise based gain tuning capability for the filter. The resulting filter exhibits efficient operation in elementary embedded hardware, intuitive system noise based gain tuning capability and accurate attitude estimation. The performance of the filter is validated using numerical simulations and by experimentally implementing the filter on an ARDrone 2.0 micro aerial vehicle platform.