 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-Vehicle Object Detection in the Wild for Driverless Vehicles
Apr 27, 2020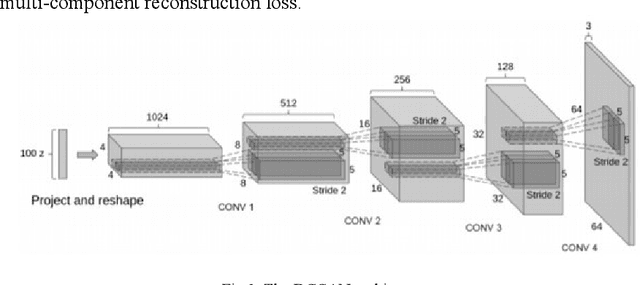
In-vehicle human object identification plays an important role in vision-based automated vehicle driving systems while objects such as pedestrians and vehicles on roads or streets are the primary targets to protect from driverless vehicles. A challenge is the difficulty to detect objects in moving under the wild conditions, while illumination and image quality could drastically vary. In this work, to address this challenge, we exploit Deep Convolutional Generative Adversarial Networks (DCGANs) with Single Shot Detector (SSD) to handle with the wild conditions. In our work, a GAN was trained with low-quality images to handle with the challenges arising from the wild conditions in smart cities, while a cascaded SSD is employed as the object detector to perform with the GAN. We used tested our approach under wild conditions using taxi driver videos on London street in both daylight and night times, and the tests from in-vehicle videos demonstrate that this strategy can drastically achieve a better detection rate under the wild conditions.
* the 14th International FLINS Conference on Robotics and Artificial Intelligence
Distant Pedestrian Detection in the Wild using Single Shot Detector with Deep Convolutional Generative Adversarial Networks
May 29, 2019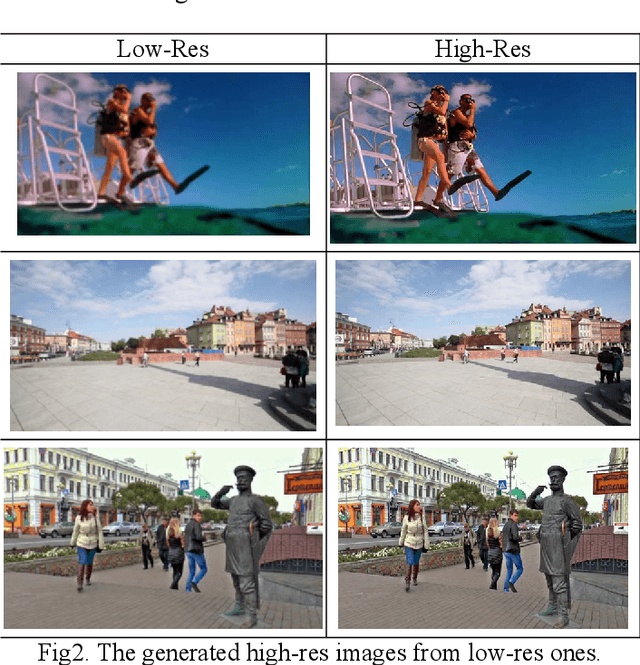
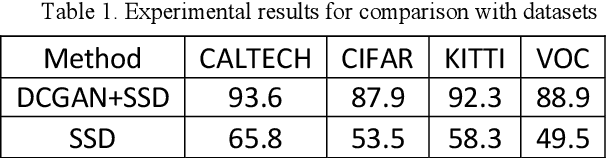
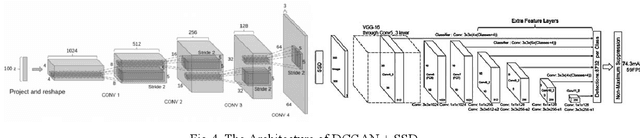
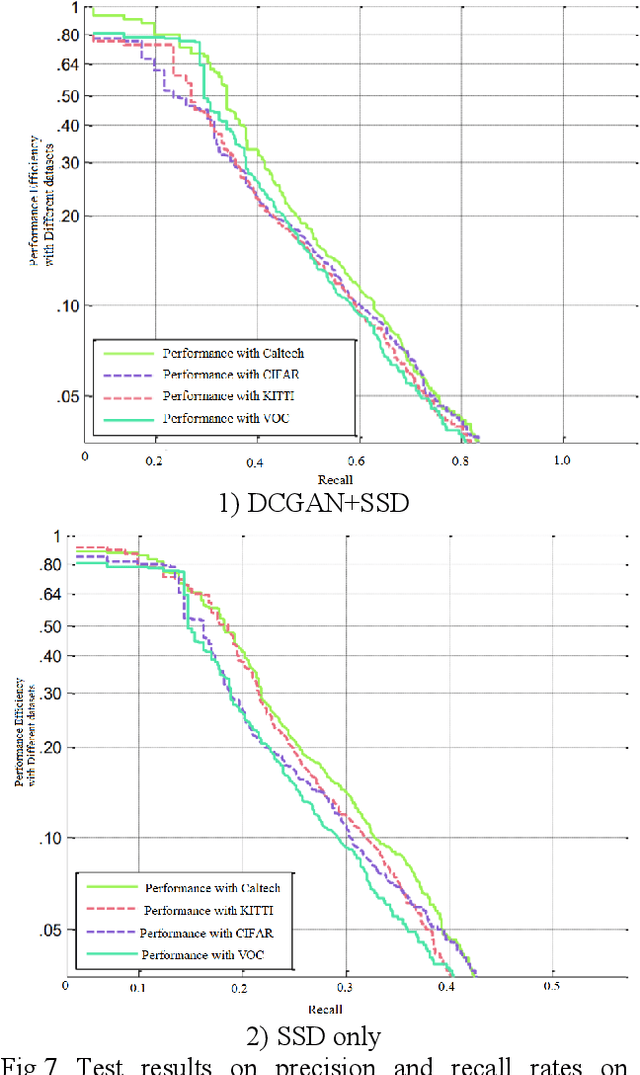
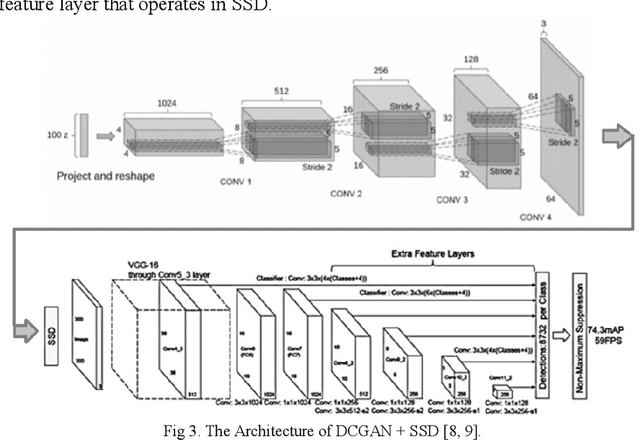
In this work, we examine the feasibility of applying Deep Convolutional Generative Adversarial Networks (DCGANs) with Single Shot Detector (SSD) as data-processing technique to handle with the challenge of pedestrian detection in the wild. Specifically, we attempted to use in-fill completion (where a portion of the image is masked) to generate random transformations of images with portions missing to expand existing labelled datasets. In our work, GAN has been trained intensively on low resolution images, in order to neutralize the challenges of the pedestrian detection in the wild, and considered humans, and few other classes for detection in smart cities. The object detector experiment performed by training GAN model along with SSD provided a substantial improvement in the results. This approach presents a very interesting overview in the current state of art on GAN networks for object detection. We used Canadian Institute for Advanced Research (CIFAR), Caltech, KITTI data set for training and testing the network under different resolutions and the experimental results with comparison been showedbetween DCGAN cascaded with SSD and SSD itself.
* arXiv admin note: text overlap with arXiv:1711.08174, arXiv:1511.06434, arXiv:1706.05274 by other authors