 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient, Decentralized, and Collaborative Multi-Robot Exploration using Optimal Transport Theory
Sep 29, 2020



An Optimal Transport (OT)-based decentralized collaborative multi-robot exploration strategy is proposed in this paper. This method is to achieve an efficient exploration with a predefined priority in the given domain. In this context, the efficiency indicates how a team of robots (agents) cover the domain reflecting the corresponding priority map (or degrees of importance) in the domain. The decentralized exploration implies that each agent carries out their exploration task independently in the absence of any supervisory agent/computer. When an agent encounters another agent within a communication range, each agent receives the information about which areas are already covered by other agents, yielding a collaborative exploration. The OT theory is employed to quantify the difference between the distribution formed by the robot trajectories and the given reference spatial distribution indicating the priority. A computationally feasible way is developed to measure the performance of the proposed exploration scheme. Further, the formal algorithm is provided for the efficient, decentralized, and collaborative exploration plan. Simulation results are presented to validate the proposed methods.
Ergodic Control Strategy for Multi-Agent Environment Exploration
Sep 29, 2020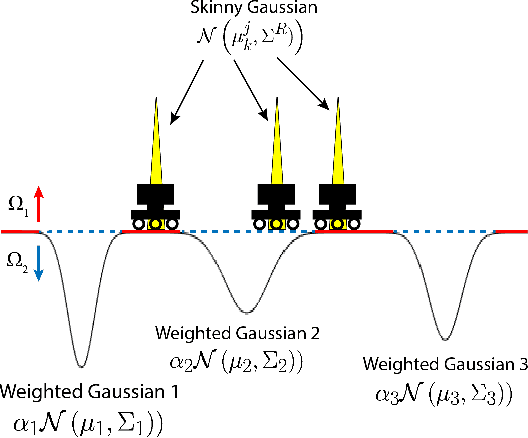
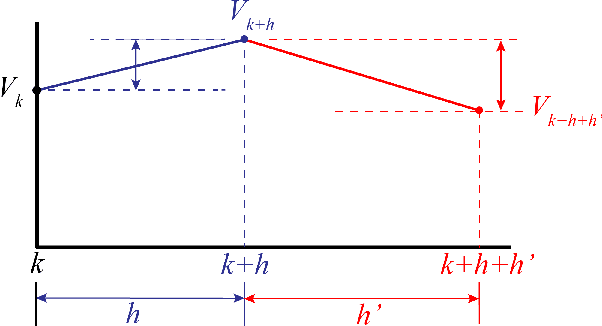
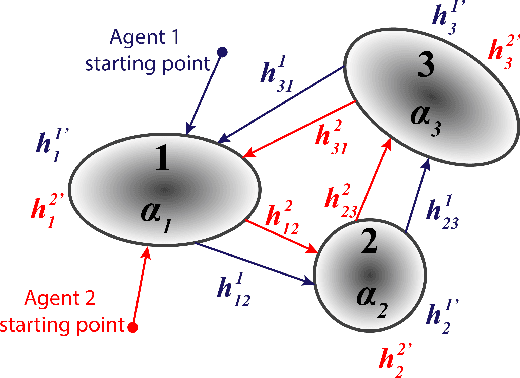
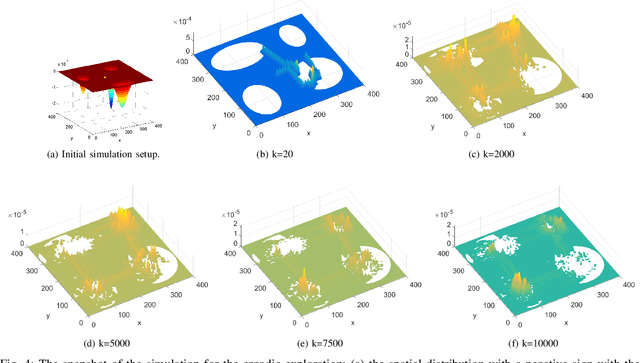
In this study, an ergodic environment exploration problem is introduced for a centralized multi-agent system. Given the reference distribution represented by the Mixture of Gaussian (MoG), the ergodicity is achieved when the time-averaged robot distribution is identical to the given reference distribution. The major challenge associated with this problem is to determine proper timing for a team of agents (robots) to visit each Gaussian component in the reference MoG for ergodicity. The ergodic function is defined as a measure of ergodicity and the condition for convergence is derived based on timing analysis. The proposed control strategy provides relatively reasonable performance to achieve the ergodicity. We provide the formal algorithm for centralized multi-agent control to achieve the ergodicity and simulation results are presented for the validation of the proposed algorithm.
Efficient Multi-Robot Exploration with Energy Constraint based on Optimal Transport Theory
Sep 02, 2020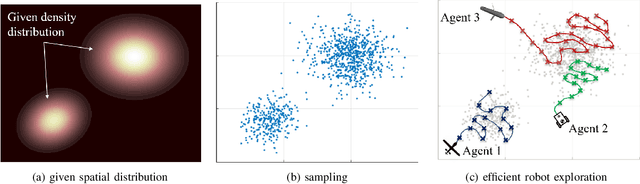
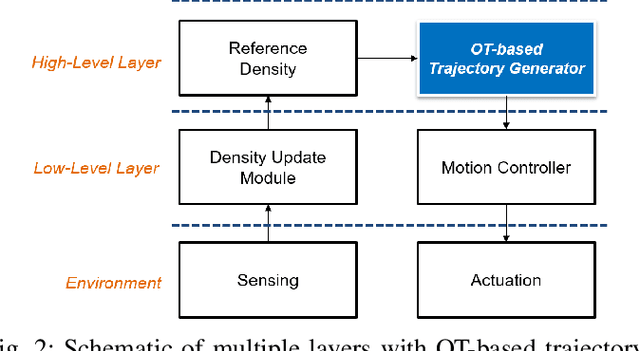
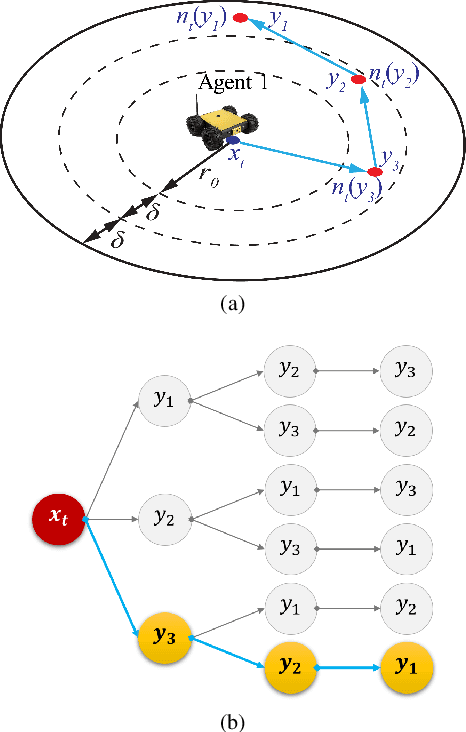
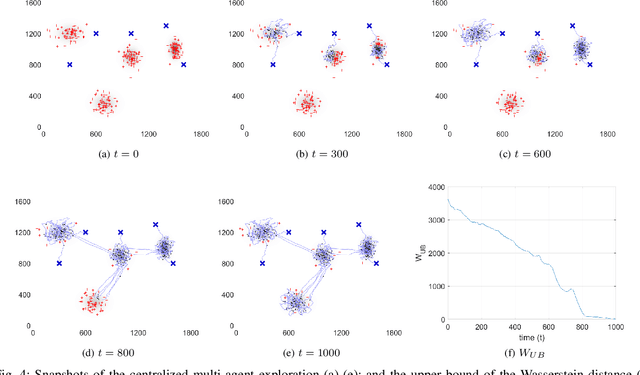
This paper addresses an Optimal Transport (OT)-based efficient multi-robot exploration problem, considering the energy constraints of a multi-robot system. The efficiency in this problem implies how a team of robots (agents) covers a given domain, reflecting a priority of areas of interest represented by a density distribution, rather than simply following a preset of uniform patterns. To achieve an efficient multi-robot exploration, the optimal transport theory that quantifies a distance between two density distributions is employed as a tool, which also serves as a means of performance measure. The energy constraints for the multi-robot system is then incorporated into the OT-based multi-robot exploration scheme. The proposed scheme is decoupled from robot dynamics, broadening the applicability of the multi-robot exploration plan to heterogeneous robot platforms. Not only the centralized but also decentralized algorithms are provided to cope with more realistic scenarios such as communication range limits between agents. To measure the exploration efficiency, the upper bound of the performance is developed for both the centralized and decentralized cases based on the optimal transport theory, which is computationally tractable as well as efficient. The proposed multi-robot exploration scheme is also applicable to a time-varying distribution, where the spatio-temporal evolution of the given reference distribution is desired. To validate the proposed method, multiple simulation results are provided.