 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementations of the Universal Birkhoff Theory for Fast Trajectory Optimization
Aug 04, 2023This is part II of a two-part paper. Part I presented a universal Birkhoff theory for fast and accurate trajectory optimization. The theory rested on two main hypotheses. In this paper, it is shown that if the computational grid is selected from any one of the Legendre and Chebyshev family of node points, be it Lobatto, Radau or Gauss, then, the resulting collection of trajectory optimization methods satisfy the hypotheses required for the universal Birkhoff theory to hold. All of these grid points can be generated at an $\mathcal{O}(1)$ computational speed. Furthermore, all Birkhoff-generated solutions can be tested for optimality by a joint application of Pontryagin's- and Covector-Mapping Principles, where the latter was developed in Part~I. More importantly, the optimality checks can be performed without resorting to an indirect method or even explicitly producing the full differential-algebraic boundary value problem that results from an application of Pontryagin's Principle. Numerical problems are solved to illustrate all these ideas. The examples are chosen to particularly highlight three practically useful features of Birkhoff methods: (1) bang-bang optimal controls can be produced without suffering any Gibbs phenomenon, (2) discontinuous and even Dirac delta covector trajectories can be well approximated, and (3) extremal solutions over dense grids can be computed in a stable and efficient manner.
An Optimal Control Theory for the Traveling Salesman Problem and Its Variants
May 07, 2020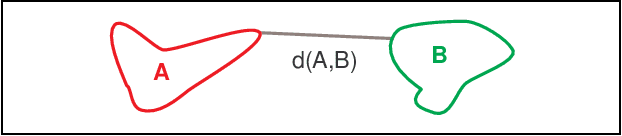
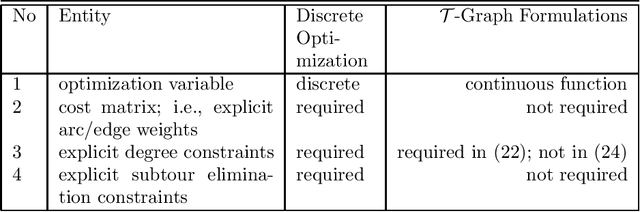
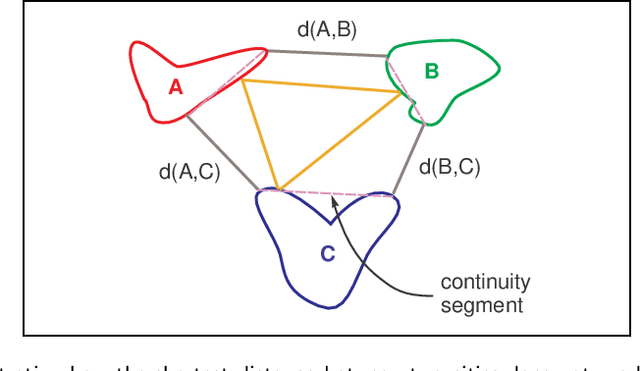
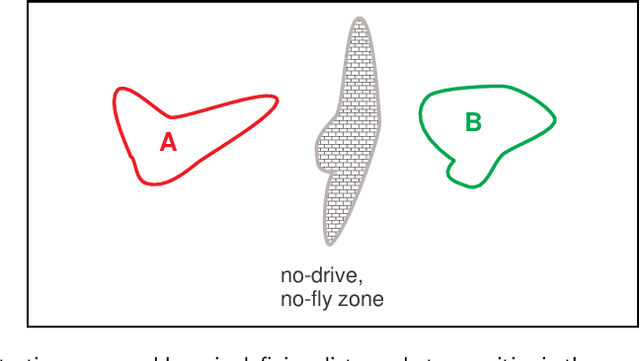
We show that the traveling salesman problem (TSP) and its many variants may be modeled as functional optimization problems over a graph. In this formulation, all vertices and arcs of the graph are functionals; i.e., a mapping from a space of measurable functions to the field of real numbers. Many variants of the TSP, such as those with neighborhoods, with forbidden neighborhoods, with time-windows and with profits, can all be framed under this construct. In sharp contrast to their discrete-optimization counterparts, the modeling constructs presented in this paper represent a fundamentally new domain of analysis and computation for TSPs and their variants. Beyond its apparent mathematical unification of a class of problems in graph theory, the main advantage of the new approach is that it facilitates the modeling of certain application-specific problems in their home space of measurable functions. Consequently, certain elements of economic system theory such as dynamical models and continuous-time cost/profit functionals can be directly incorporated in the new optimization problem formulation. Furthermore, subtour elimination constraints, prevalent in discrete optimization formulations, are naturally enforced through continuity requirements. The price for the new modeling framework is nonsmooth functionals. Although a number of theoretical issues remain open in the proposed mathematical framework, we demonstrate the computational viability of the new modeling constructs over a sample set of problems to illustrate the rapid production of end-to-end TSP solutions to extensively-constrained practical problems.