 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentDNS: A Root Domain Naming System for LLM Agents
May 28, 2025The rapid evolution of Large Language Model (LLM) agents has highlighted critical challenges in cross-vendor service discovery, interoperability, and communication. Existing protocols like model context protocol and agent-to-agent protocol have made significant strides in standardizing interoperability between agents and tools, as well as communication among multi-agents. However, there remains a lack of standardized protocols and solutions for service discovery across different agent and tool vendors. In this paper, we propose AgentDNS, a root domain naming and service discovery system designed to enable LLM agents to autonomously discover, resolve, and securely invoke third-party agent and tool services across organizational and technological boundaries. Inspired by the principles of the traditional DNS, AgentDNS introduces a structured mechanism for service registration, semantic service discovery, secure invocation, and unified billing. We detail the architecture, core functionalities, and use cases of AgentDNS, demonstrating its potential to streamline multi-agent collaboration in real-world scenarios. The source code will be published on https://github.com/agentdns.
Micro-Doppler Based Human-Robot Classification Using Ensemble and Deep Learning Approaches
Feb 26, 2018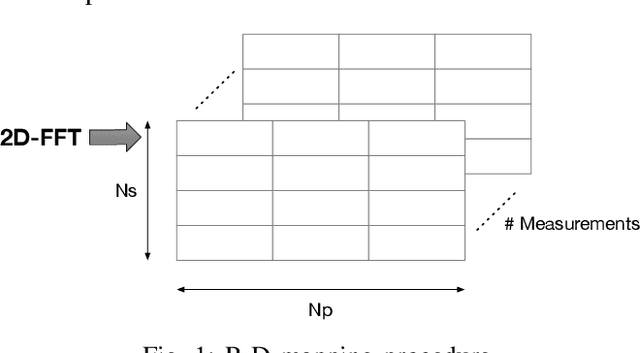
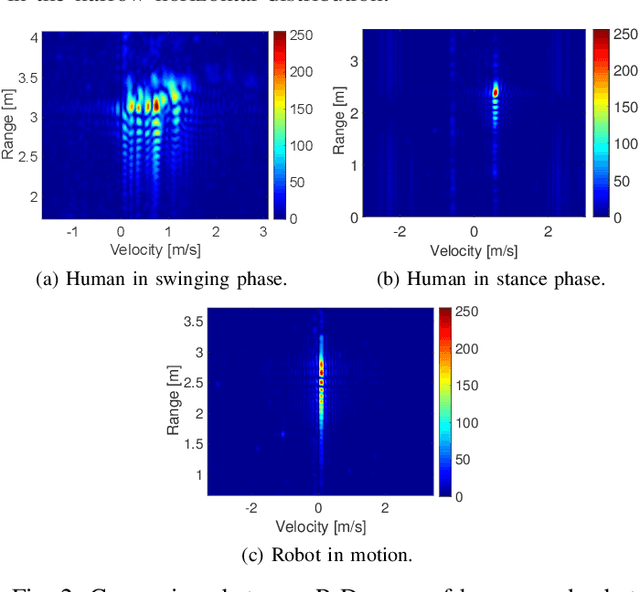
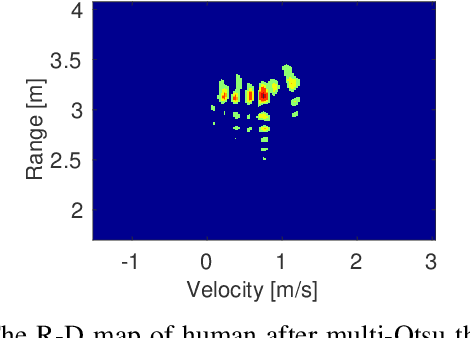
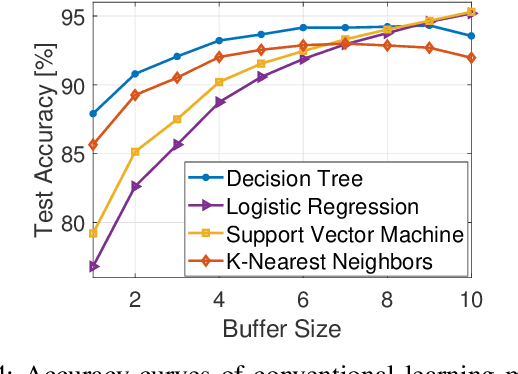
Radar sensors can be used for analyzing the induced frequency shifts due to micro-motions in both range and velocity dimensions identified as micro-Doppler ($\boldsymbol{\mu}$-D) and micro-Range ($\boldsymbol{\mu}$-R), respectively. Different moving targets will have unique $\boldsymbol{\mu}$-D and $\boldsymbol{\mu}$-R signatures that can be used for target classification. Such classification can be used in numerous fields, such as gait recognition, safety and surveillance. In this paper, a 25 GHz FMCW Single-Input Single-Output (SISO) radar is used in industrial safety for real-time human-robot identification. Due to the real-time constraint, joint Range-Doppler (R-D) maps are directly analyzed for our classification problem. Furthermore, a comparison between the conventional classical learning approaches with handcrafted extracted features, ensemble classifiers and deep learning approaches is presented. For ensemble classifiers, restructured range and velocity profiles are passed directly to ensemble trees, such as gradient boosting and random forest without feature extraction. Finally, a Deep Convolutional Neural Network (DCNN) is used and raw R-D images are directly fed into the constructed network. DCNN shows a superior performance of 99\% accuracy in identifying humans from robots on a single R-D map.
* 6 pages, accepted in IEEE Radar Conference 2018