 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausally-Constrained Probabilistic Forecasting for Time-Series Anomaly Detection
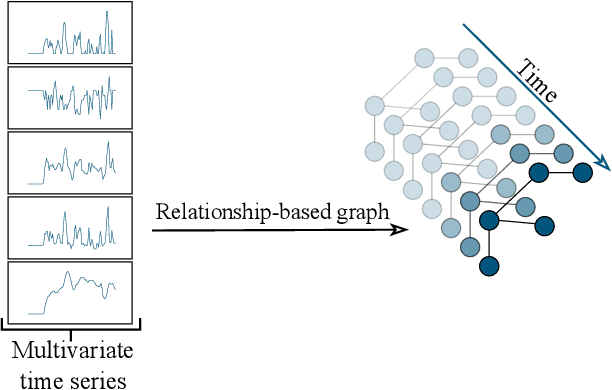
Apr 20, 2026Anomaly detection in multivariate time series is a central challenge in industrial monitoring, as failures frequently arise from complex temporal dynamics and cross-sensor interactions. While recent deep learning models, including graph neural networks and Transformers, have demonstrated strong empirical performance, most approaches remain primarily correlational and offer limited support for causal interpretation and root-cause localization. This study introduces a causally-constrained probabilistic forecasting framework which is a Causally Guided Transformer (CGT) model for multivariate time-series anomaly detection, integrating an explicit time-lagged causal graph prior with deep sequence modeling. For each target variable, a dedicated forecasting block employs a hard parent mask derived from causal discovery to restrict the main prediction pathway to graph-supported causes, while a latent Gaussian head captures predictive uncertainty. To leverage residual correlational information without compromising the causal representation, a shadow auxiliary path with stop-gradient isolation and a safety-gated blending mechanism is incorporated to suppress non-causal contributions when reliability is low. Anomalies are identified using negative log-likelihood scores with adaptive streaming thresholding, and root-cause variables are determined through per-dimension probabilistic attribution and counterfactual clamping. Experiments on the ASD and SMD benchmarks indicate that the proposed method achieves state-of-the-art detection performance, with F1-scores of 96.19% on ASD and 95.32% on SMD, and enhances variable-level attribution quality. These findings suggest that causal structural priors can improve both robustness and interpretability in detecting deep anomalies in multivariate sensor systems.
Enhancing Road Safety through Accurate Detection of Hazardous Driving Behaviors with Graph Convolutional Recurrent Networks
May 08, 2023


Car accidents remain a significant public safety issue worldwide, with the majority of them attributed to driver errors stemming from inadequate driving knowledge, non-compliance with regulations, and poor driving habits. To improve road safety, Driving Behavior Detection (DBD) systems have been proposed in several studies to identify safe and unsafe driving behavior. Many of these studies have utilized sensor data obtained from the Controller Area Network (CAN) bus to construct their models. However, the use of publicly available sensors is known to reduce the accuracy of detection models, while incorporating vendor-specific sensors into the dataset increases accuracy. To address the limitations of existing approaches, we present a reliable DBD system based on Graph Convolutional Long Short-Term Memory Networks (GConvLSTM) that enhances the precision and practicality of DBD models using public sensors. Additionally, we incorporate non-public sensors to evaluate the model's effectiveness. Our proposed model achieved a high accuracy of 97.5\% for public sensors and an average accuracy of 98.1\% for non-public sensors, indicating its consistency and accuracy in both settings. To enable local driver behavior analysis, we deployed our DBD system on a Raspberry Pi at the network edge, with drivers able to access daily driving condition reports, sensor data, and prediction results through a monitoring dashboard. Furthermore, the dashboard issues voice warnings to alert drivers of hazardous driving conditions. Our findings demonstrate that the proposed system can effectively detect hazardous and unsafe driving behavior, with potential applications in improving road safety and reducing the number of accidents caused by driver errors.