 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePierre-Yves Oudeyer
Multi-Agent Reinforcement Learning as a Computational Tool for Language Evolution Research: Historical Context and Future Challenges
Feb 20, 2020
Computational models of emergent communication in agent populations are currently gaining interest in the machine learning community due to recent advances in Multi-Agent Reinforcement Learning (MARL). Current contributions are however still relatively disconnected from the earlier theoretical and computational literature aiming at understanding how language might have emerged from a prelinguistic substance. The goal of this paper is to position recent MARL contributions within the historical context of language evolution research, as well as to extract from this theoretical and computational background a few challenges for future research.
User-in-the-loop Adaptive Intent Detection for Instructable Digital Assistant
Jan 16, 2020
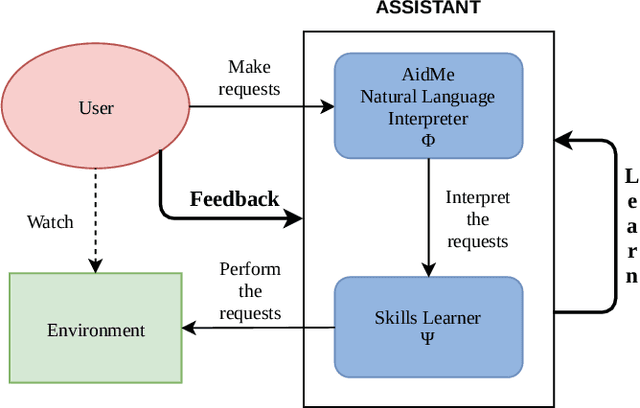
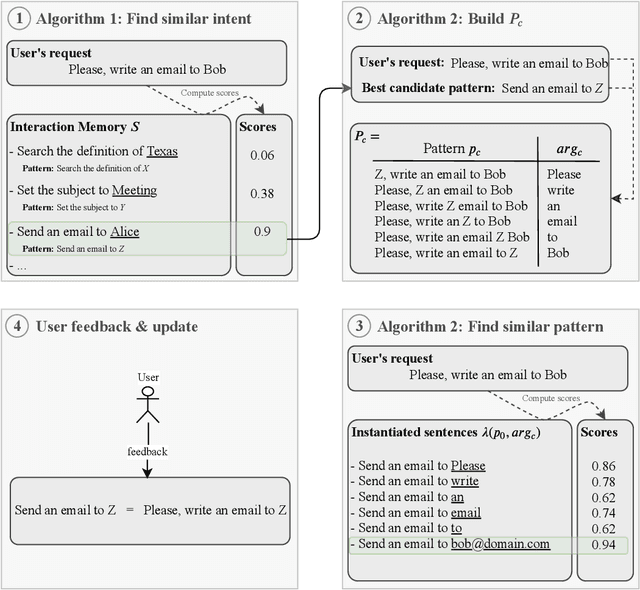
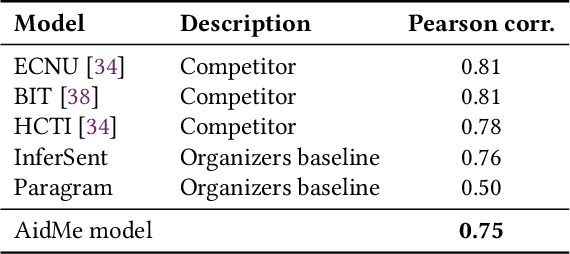
People are becoming increasingly comfortable using Digital Assistants (DAs) to interact with services or connected objects. However, for non-programming users, the available possibilities for customizing their DA are limited and do not include the possibility of teaching the assistant new tasks. To make the most of the potential of DAs, users should be able to customize assistants by instructing them through Natural Language (NL). To provide such functionalities, NL interpretation in traditional assistants should be improved: (1) The intent identification system should be able to recognize new forms of known intents, and to acquire new intents as they are expressed by the user. (2) In order to be adaptive to novel intents, the Natural Language Understanding module should be sample efficient, and should not rely on a pretrained model. Rather, the system should continuously collect the training data as it learns new intents from the user. In this work, we propose AidMe (Adaptive Intent Detection in Multi-Domain Environments), a user-in-the-loop adaptive intent detection framework that allows the assistant to adapt to its user by learning his intents as their interaction progresses. AidMe builds its repertoire of intents and collects data to train a model of semantic similarity evaluation that can discriminate between the learned intents and autonomously discover new forms of known intents. AidMe addresses two major issues - intent learning and user adaptation - for instructable digital assistants. We demonstrate the capabilities of AidMe as a standalone system by comparing it with a one-shot learning system and a pretrained NLU module through simulations of interactions with a user. We also show how AidMe can smoothly integrate to an existing instructable digital assistant.
* To be published as a conference paper in the proceedings of IUI'20
Language Grounding through Social Interactions and Curiosity-Driven Multi-Goal Learning
Nov 08, 2019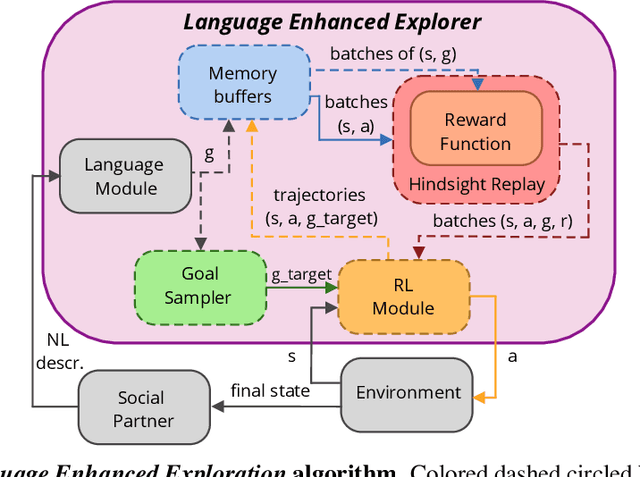
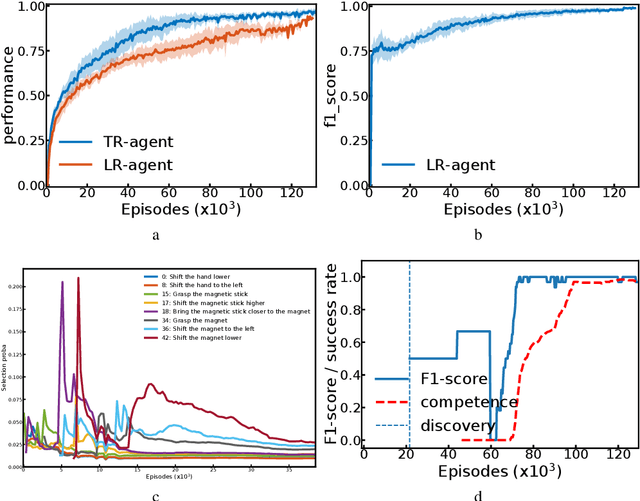
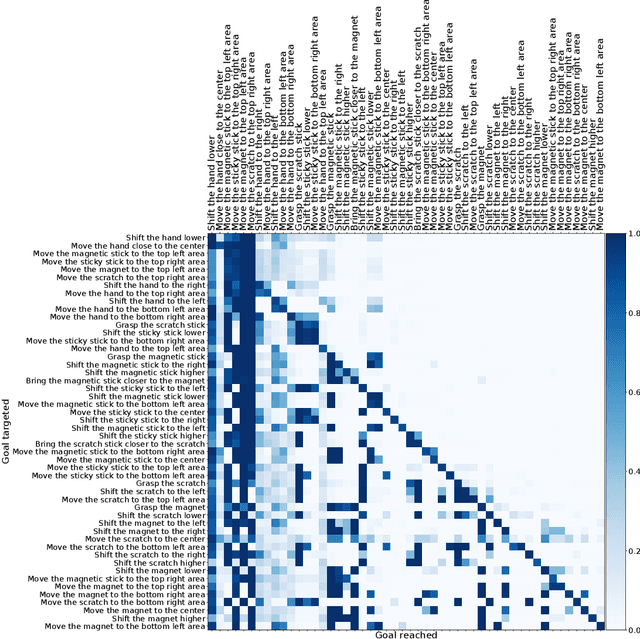
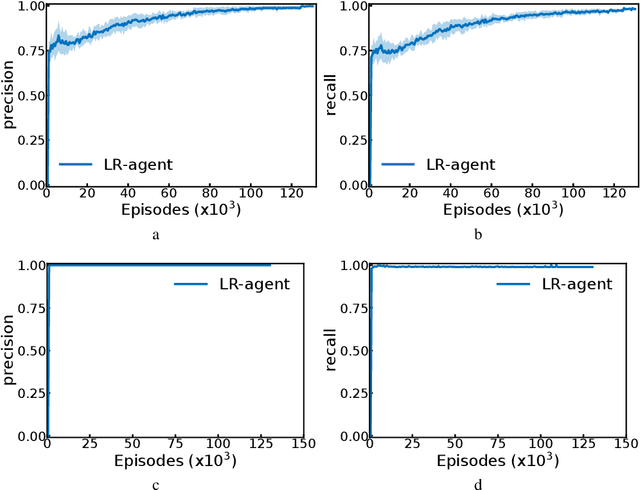
Autonomous reinforcement learning agents, like children, do not have access to predefined goals and reward functions. They must discover potential goals, learn their own reward functions and engage in their own learning trajectory. Children, however, benefit from exposure to language, helping to organize and mediate their thought. We propose LE2 (Language Enhanced Exploration), a learning algorithm leveraging intrinsic motivations and natural language (NL) interactions with a descriptive social partner (SP). Using NL descriptions from the SP, it can learn an NL-conditioned reward function to formulate goals for intrinsically motivated goal exploration and learn a goal-conditioned policy. By exploring, collecting descriptions from the SP and jointly learning the reward function and the policy, the agent grounds NL descriptions into real behavioral goals. From simple goals discovered early to more complex goals discovered by experimenting on simpler ones, our agent autonomously builds its own behavioral repertoire. This naturally occurring curriculum is supplemented by an active learning curriculum resulting from the agent's intrinsic motivations. Experiments are presented with a simulated robotic arm that interacts with several objects including tools.
Teacher algorithms for curriculum learning of Deep RL in continuously parameterized environments
Oct 16, 2019

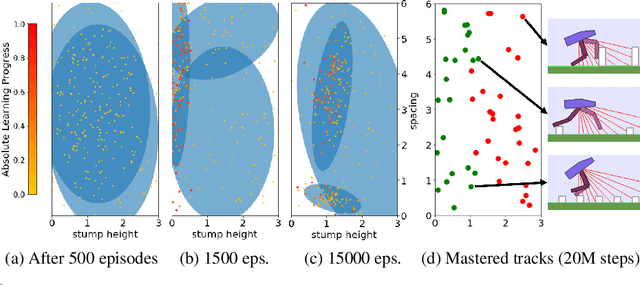
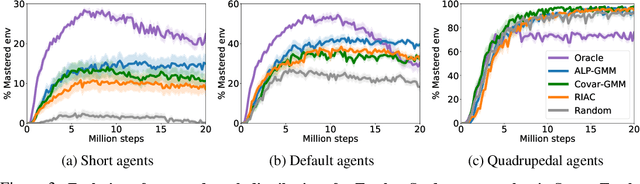
We consider the problem of how a teacher algorithm can enable an unknown Deep Reinforcement Learning (DRL) student to become good at a skill over a wide range of diverse environments. To do so, we study how a teacher algorithm can learn to generate a learning curriculum, whereby it sequentially samples parameters controlling a stochastic procedural generation of environments. Because it does not initially know the capacities of its student, a key challenge for the teacher is to discover which environments are easy, difficult or unlearnable, and in what order to propose them to maximize the efficiency of learning over the learnable ones. To achieve this, this problem is transformed into a surrogate continuous bandit problem where the teacher samples environments in order to maximize absolute learning progress of its student. We present a new algorithm modeling absolute learning progress with Gaussian mixture models (ALP-GMM). We also adapt existing algorithms and provide a complete study in the context of DRL. Using parameterized variants of the BipedalWalker environment, we study their efficiency to personalize a learning curriculum for different learners (embodiments), their robustness to the ratio of learnable/unlearnable environments, and their scalability to non-linear and high-dimensional parameter spaces. Videos and code are available at https://github.com/flowersteam/teachDeepRL.
Intrinsically Motivated Discovery of Diverse Patterns in Self-Organizing Systems
Sep 30, 2019In many complex dynamical systems, artificial or natural, one can observe self-organization of patterns emerging from local rules. Cellular automata, like the Game of Life (GOL), have been widely used as abstract models enabling the study of various aspects of self-organization and morphogenesis, such as the emergence of spatially localized patterns. However, findings of self-organized patterns in such models have so far relied on manual tuning of parameters and initial states, and on the human eye to identify interesting patterns. In this paper, we formulate the problem of automated discovery of diverse self-organized patterns in such high-dimensional complex dynamical systems, as well as a framework for experimentation and evaluation. Using a continuous GOL as a testbed, we show that recent intrinsically-motivated machine learning algorithms (POP-IMGEPs), initially developed for learning of inverse models in robotics, can be transposed and used in this novel application area. These algorithms combine intrinsically-motivated goal exploration and unsupervised learning of goal space representations. Goal space representations describe the interesting features of patterns for which diverse variations should be discovered. In particular, we compare various approaches to define and learn goal space representations from the perspective of discovering diverse spatially localized patterns. Moreover, we introduce an extension of a state-of-the-art POP-IMGEP algorithm which incrementally learns a goal representation using a deep auto-encoder, and the use of CPPN primitives for generating initialization parameters. We show that it is more efficient than several baselines and equally efficient as a system pre-trained on a hand-made database of patterns identified by human experts.
Intrinsically Motivated Exploration for Automated Discovery of Patterns in Morphogenetic Systems
Aug 19, 2019Exploration is a cornerstone both for machine learning algorithms and for science in general to discover novel solutions, phenomena and behaviors. Intrinsically motivated goal exploration processes (IMGEPs) were shown to enable autonomous agents to efficiently explore the diversity of effects they can produce on their environment. With IMGEPs, agents self-define their own experiments by imagining goals, then try to achieve them by leveraging their past discoveries. Progressively they learn which goals are achievable. IMGEPs were shown to enable efficient discovery and learning of diverse repertoires of skills in high-dimensional robots. In this article, we show that the IMGEP framework can also be used in an entirely different application area: automated discovery of self-organized patterns in complex morphogenetic systems. We also introduce a new IMGEP algorithm where goal representations are learned online and incrementally (past approaches used precollected training data with batch learning). For experimentation, we use Lenia, a continuous game-of-life cellular automaton. We study how IMGEPs enable to discover a variety of complex self-organized visual patterns. We compare random search and goal exploration methods with hand-defined, pretrained and online learned goal spaces. The results show that goal exploration methods identify more diverse patterns compared to random explorations. Moreover, the online learned goal spaces allow to successfully discover interesting patterns similar to the ones manually identified by human experts. Our results exemplify the ability of IMGEPs to discover novel structures and patterns in complex systems. We are optimistic that their application will aid the understanding and discovery of new knowledge in various domains of science and engineering.
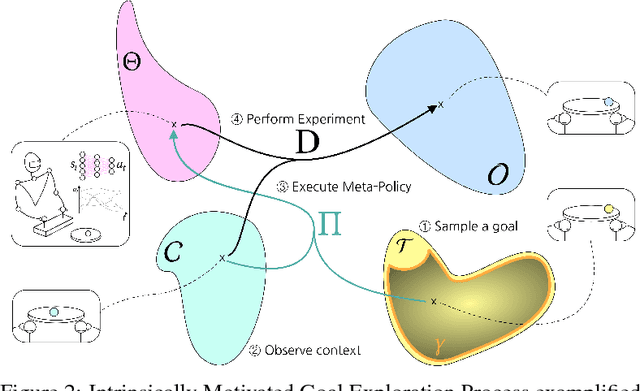
Autonomous Goal Exploration using Learned Goal Spaces for Visuomotor Skill Acquisition in Robots
Jun 10, 2019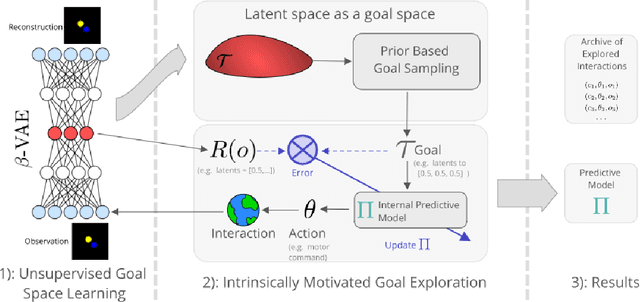
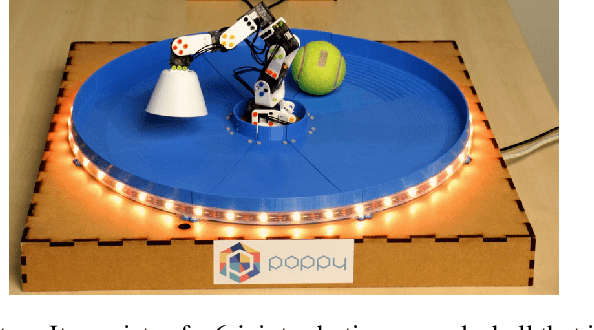
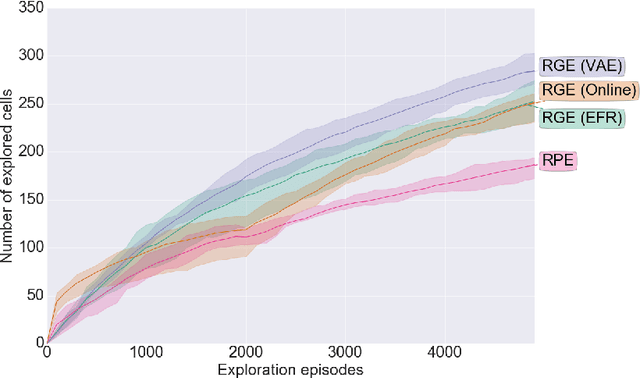
The automatic and efficient discovery of skills, without supervision, for long-living autonomous agents, remains a challenge of Artificial Intelligence. Intrinsically Motivated Goal Exploration Processes give learning agents a human-inspired mechanism to sequentially select goals to achieve. This approach gives a new perspective on the lifelong learning problem, with promising results on both simulated and real-world experiments. Until recently, those algorithms were restricted to domains with experimenter-knowledge, since the Goal Space used by the agents was built on engineered feature extractors. The recent advances of deep representation learning, enables new ways of designing those feature extractors, using directly the agent experience. Recent work has shown the potential of those methods on simple yet challenging simulated domains. In this paper, we present recent results showing the applicability of those principles on a real-world robotic setup, where a 6-joint robotic arm learns to manipulate a ball inside an arena, by choosing goals in a space learned from its past experience.
A Hitchhiker's Guide to Statistical Comparisons of Reinforcement Learning Algorithms
Apr 15, 2019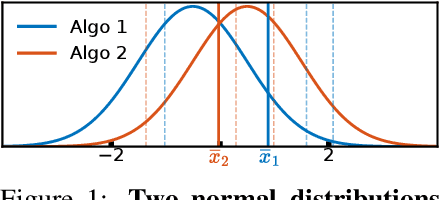
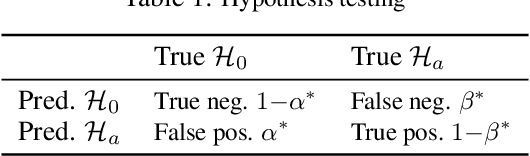
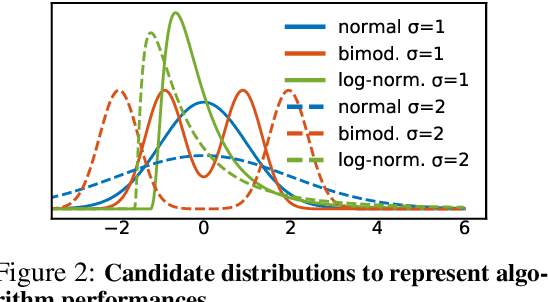
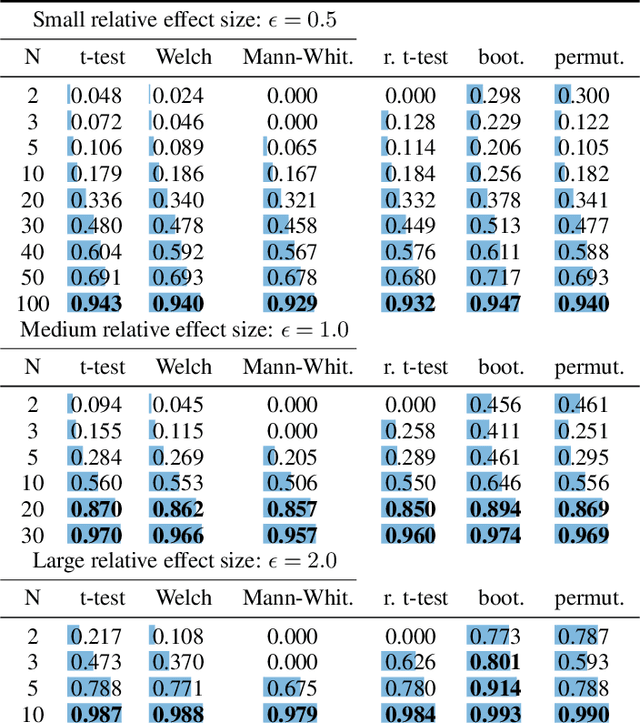
Consistently checking the statistical significance of experimental results is the first mandatory step towards reproducible science. This paper presents a hitchhiker's guide to rigorous comparisons of reinforcement learning algorithms. After introducing the concepts of statistical testing, we review the relevant statistical tests and compare them empirically in terms of false positive rate and statistical power as a function of the sample size (number of seeds) and effect size. We further investigate the robustness of these tests to violations of the most common hypotheses (normal distributions, same distributions, equal variances). Beside simulations, we compare empirical distributions obtained by running Soft-Actor Critic and Twin-Delayed Deep Deterministic Policy Gradient on Half-Cheetah. We conclude by providing guidelines and code to perform rigorous comparisons of RL algorithm performances.
Computational and Robotic Models of Early Language Development: A Review
Mar 25, 2019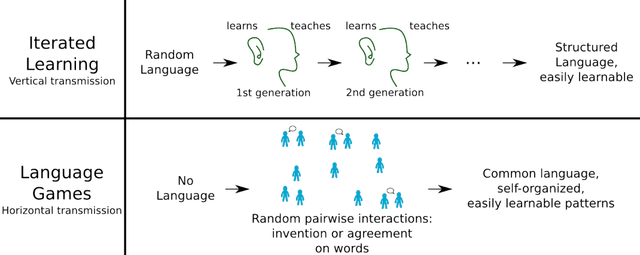
We review computational and robotics models of early language learning and development. We first explain why and how these models are used to understand better how children learn language. We argue that they provide concrete theories of language learning as a complex dynamic system, complementing traditional methods in psychology and linguistics. We review different modeling formalisms, grounded in techniques from machine learning and artificial intelligence such as Bayesian and neural network approaches. We then discuss their role in understanding several key mechanisms of language development: cross-situational statistical learning, embodiment, situated social interaction, intrinsically motivated learning, and cultural evolution. We conclude by discussing future challenges for research, including modeling of large-scale empirical data about language acquisition in real-world environments. Keywords: Early language learning, Computational and robotic models, machine learning, development, embodiment, social interaction, intrinsic motivation, self-organization, dynamical systems, complexity.
Curiosity Driven Exploration of Learned Disentangled Goal Spaces
Nov 04, 2018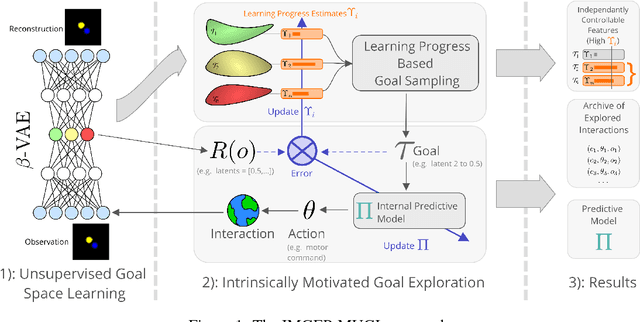

Intrinsically motivated goal exploration processes enable agents to autonomously sample goals to explore efficiently complex environments with high-dimensional continuous actions. They have been applied successfully to real world robots to discover repertoires of policies producing a wide diversity of effects. Often these algorithms relied on engineered goal spaces but it was recently shown that one can use deep representation learning algorithms to learn an adequate goal space in simple environments. However, in the case of more complex environments containing multiple objects or distractors, an efficient exploration requires that the structure of the goal space reflects the one of the environment. In this paper we show that using a disentangled goal space leads to better exploration performances than an entangled goal space. We further show that when the representation is disentangled, one can leverage it by sampling goals that maximize learning progress in a modular manner. Finally, we show that the measure of learning progress, used to drive curiosity-driven exploration, can be used simultaneously to discover abstract independently controllable features of the environment.
* The code used in the experiments is available at https://github.com/flowersteam/Curiosity_Driven_Goal_Exploration